
Fund the Run to Regionals: 2-Week Sprint for Teams 3734 & 6832
By Iron Giant 3734 and Iron Reign 6832

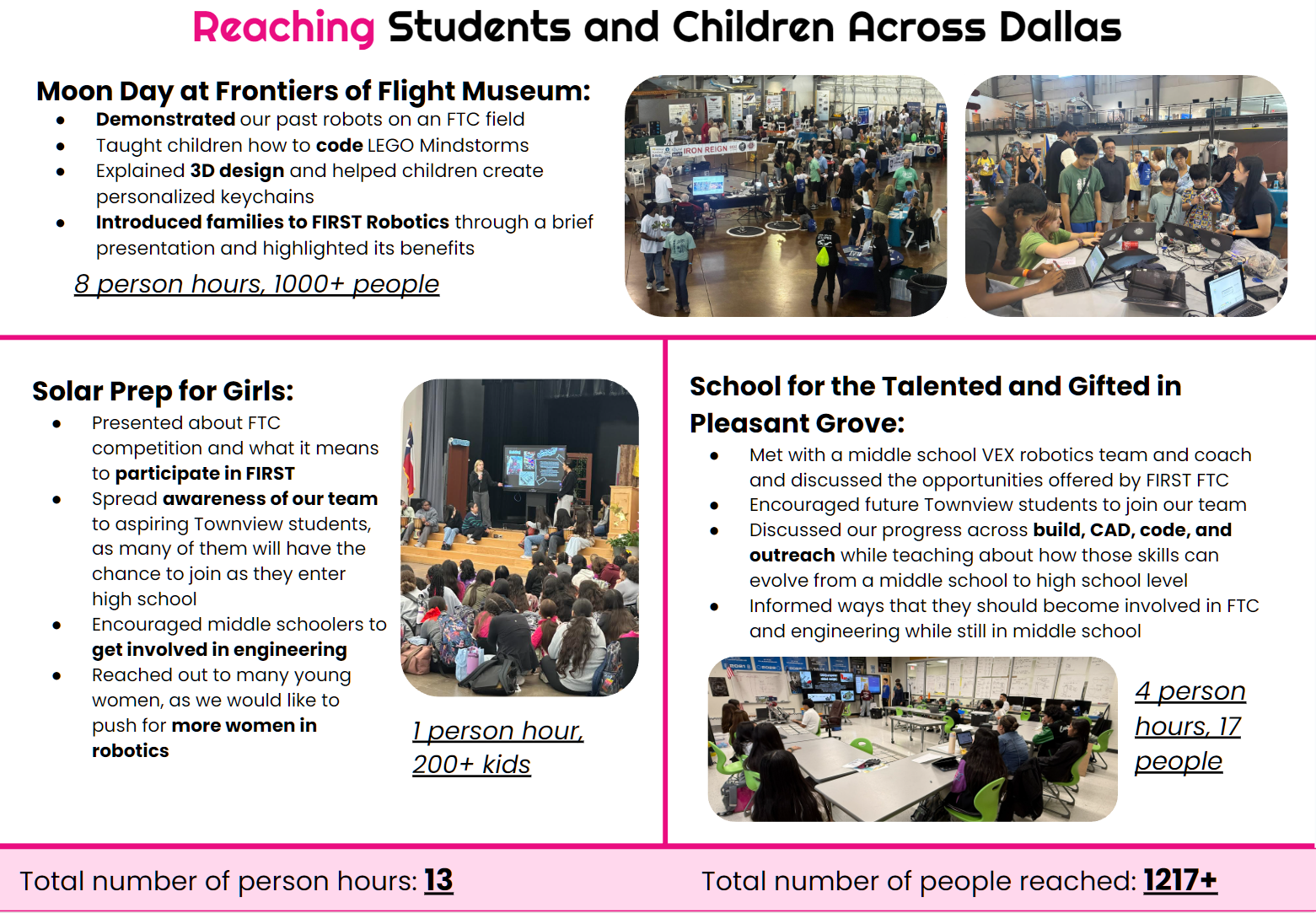
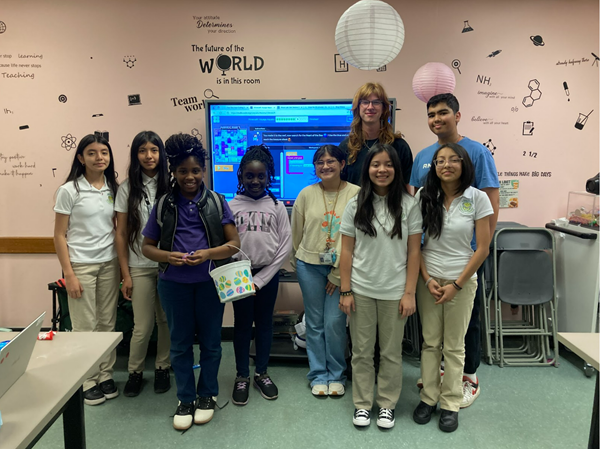
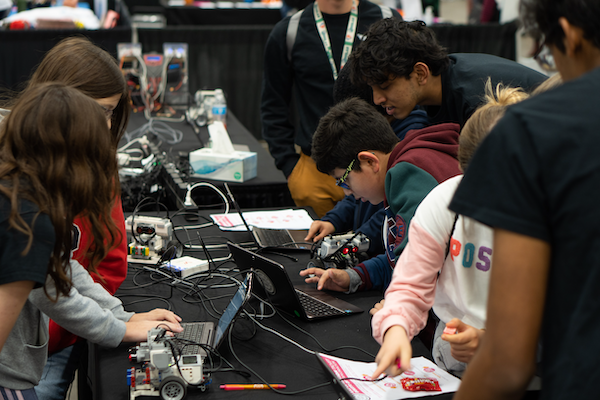
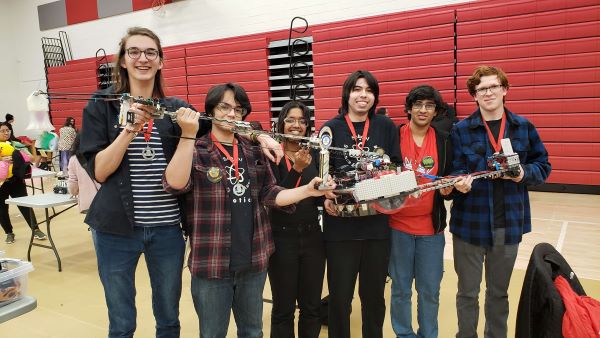
We are 3734 Iron Giant and 6832 Iron Reign from Townview. We just advanced at our league tournament and earned major awards (Design + Reach). We have two advancement events in the next two weekends — real opportunities to reach Regionals (and beyond).
Fundraising goal: $2,500 this week so we can place parts orders and build upgrades in time.
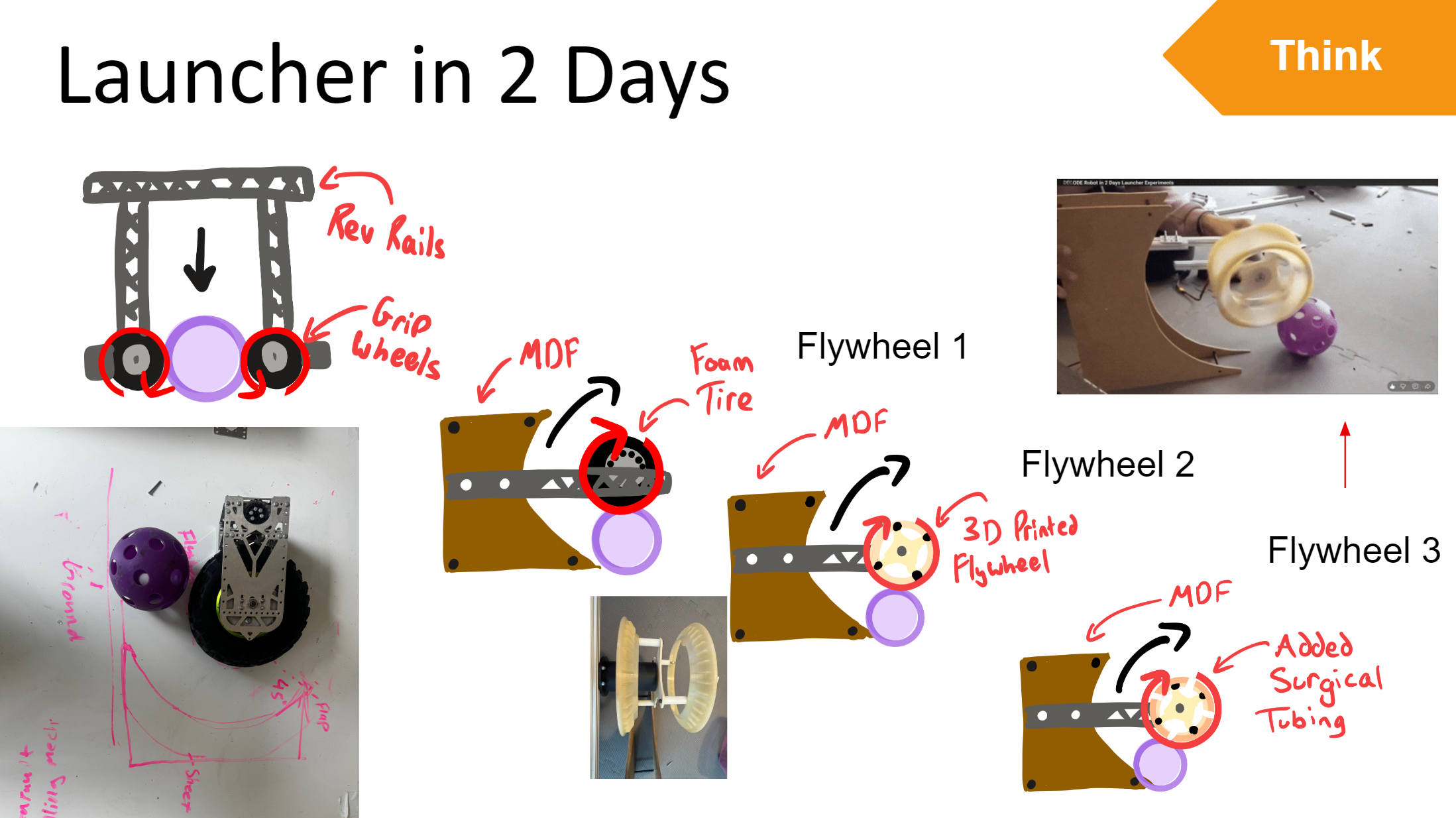
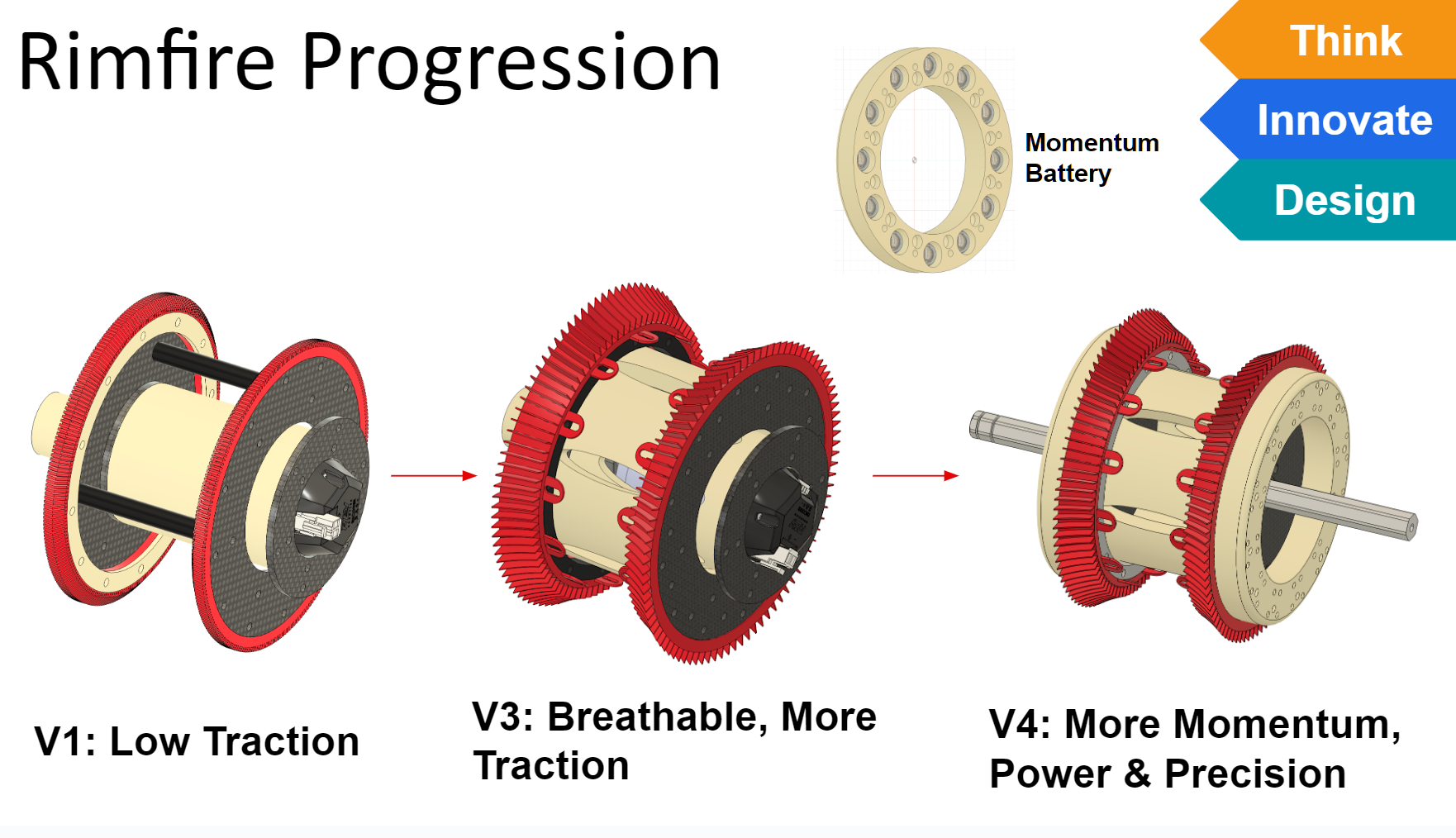
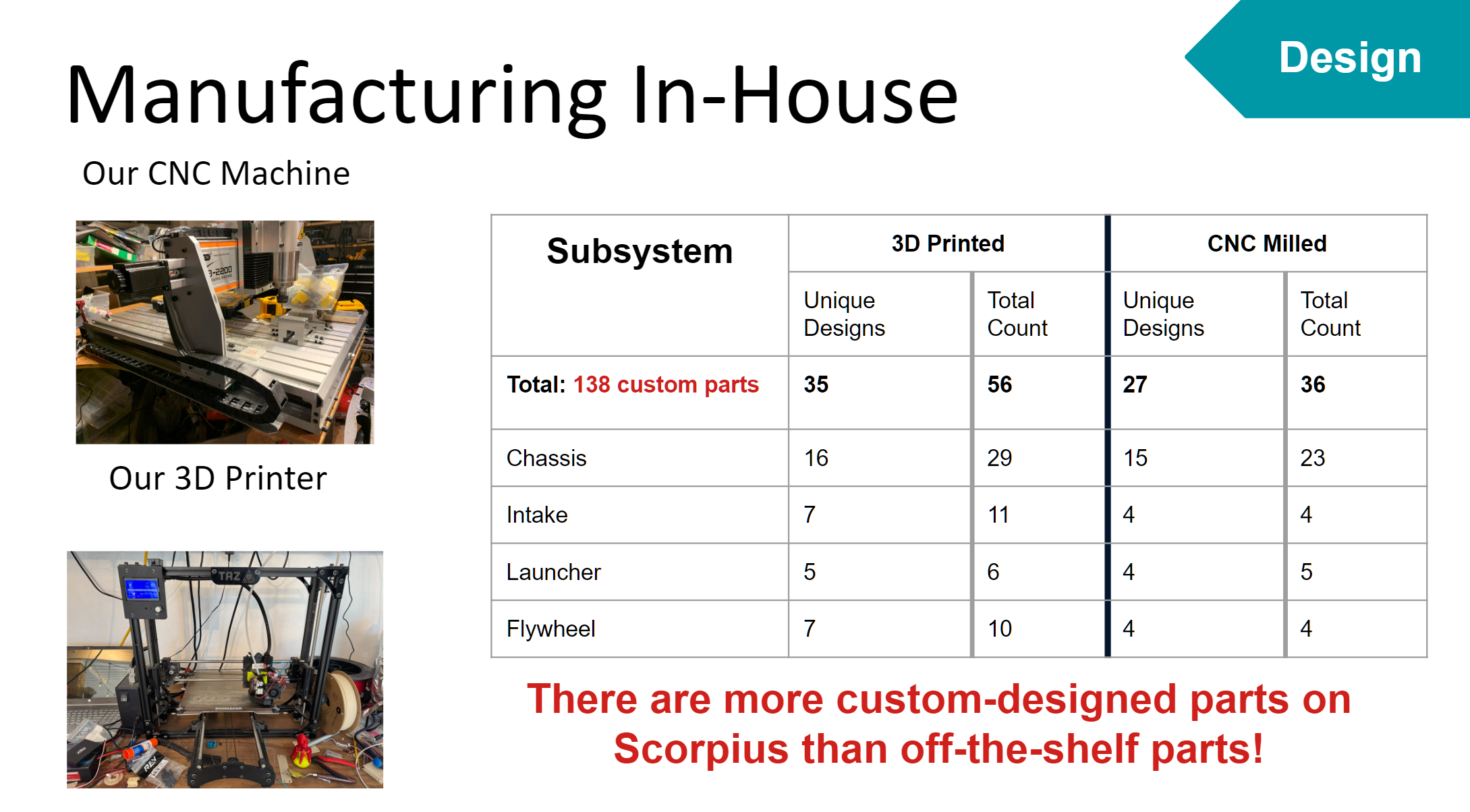
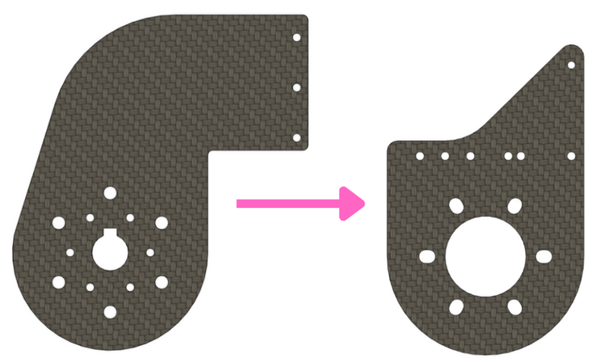
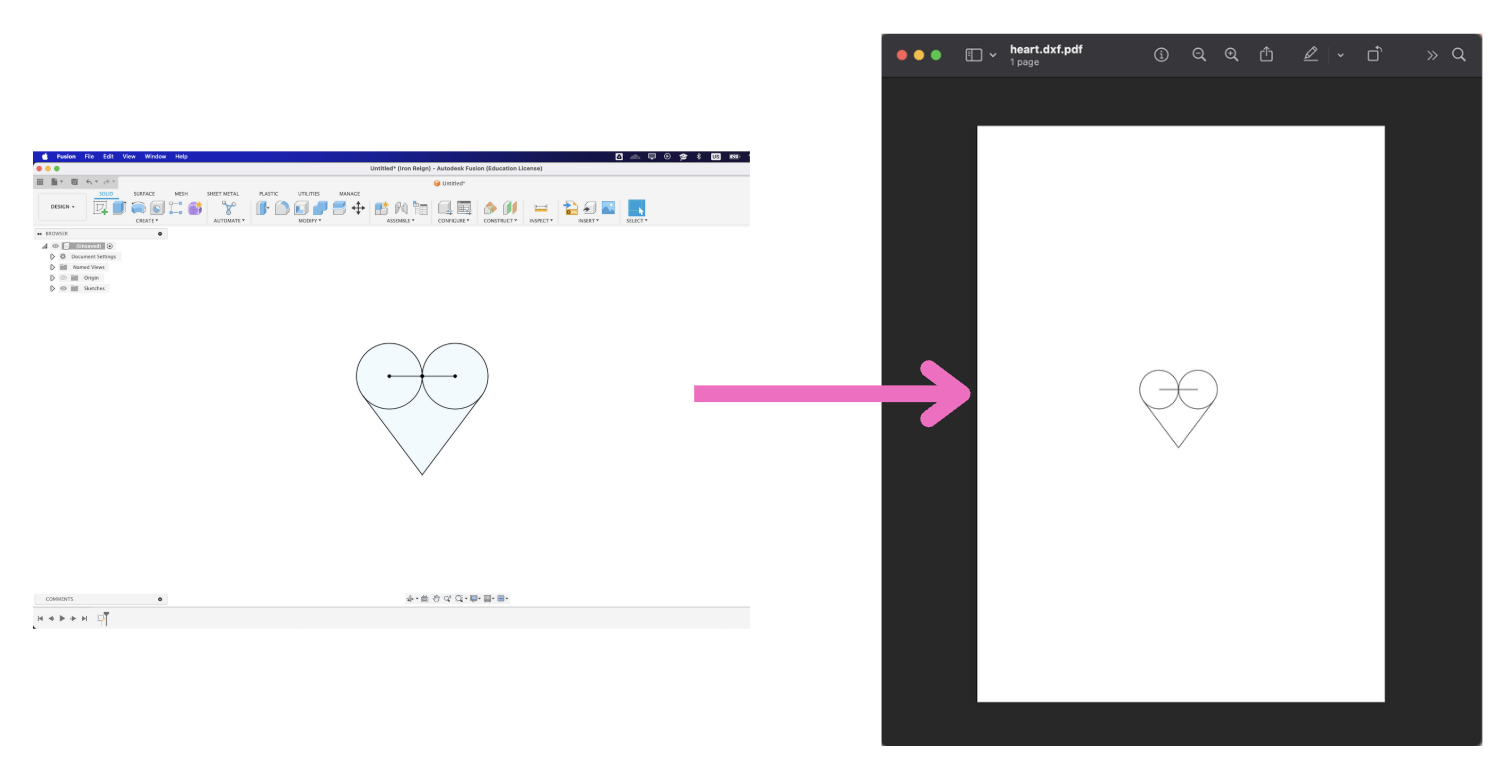
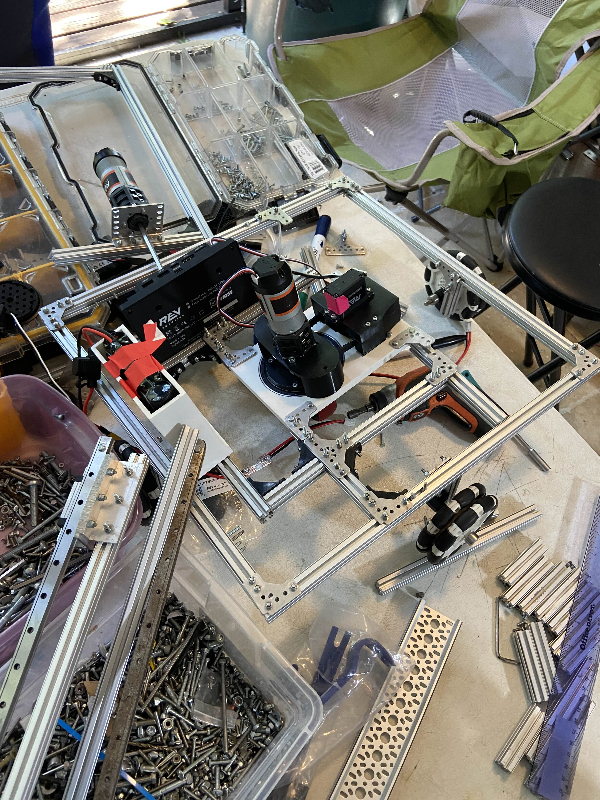
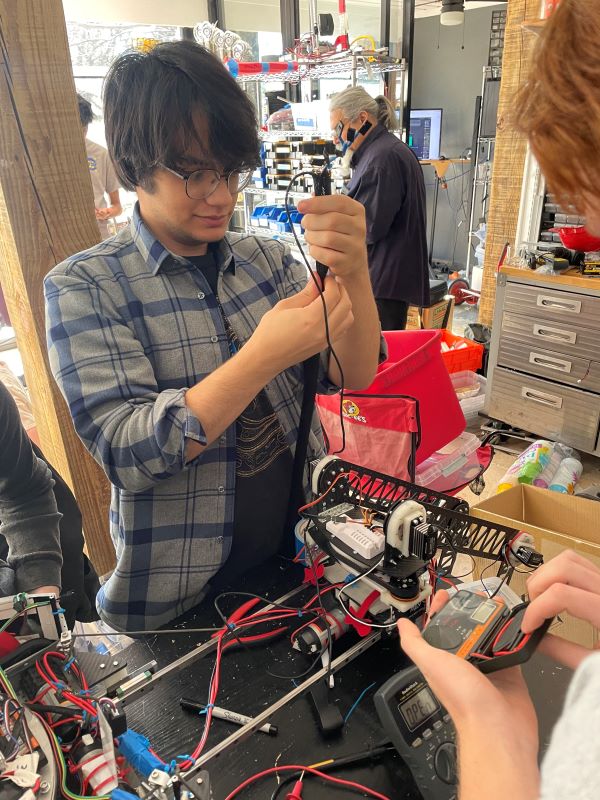
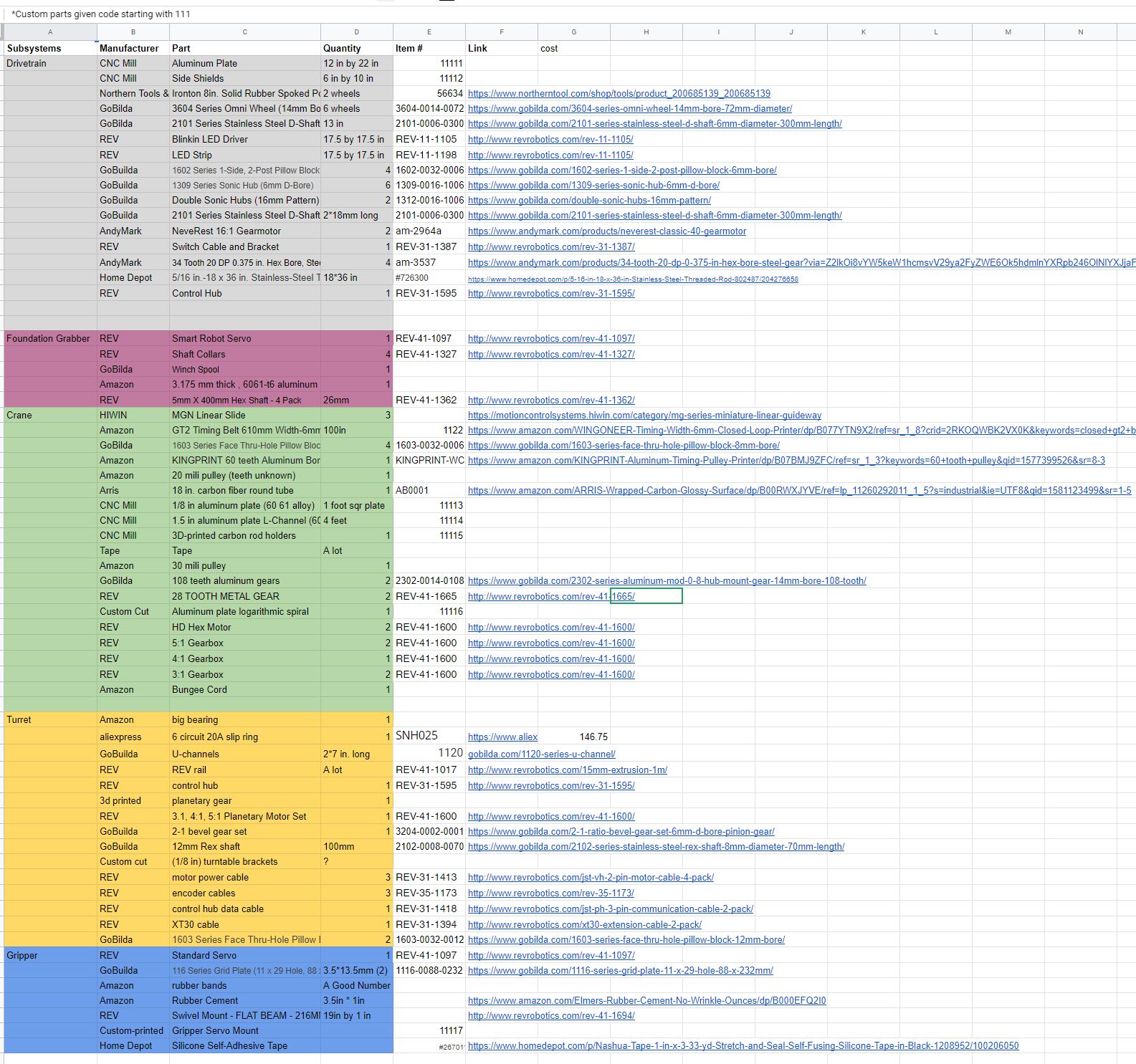
Why this is urgent: We can fabricate upgrades quickly (CNC machining + engineering 3D printing), but our parts budget is depleted and grant funding didn't come through this year. Donations this week directly translate into on-robot improvements before the next qualifier.
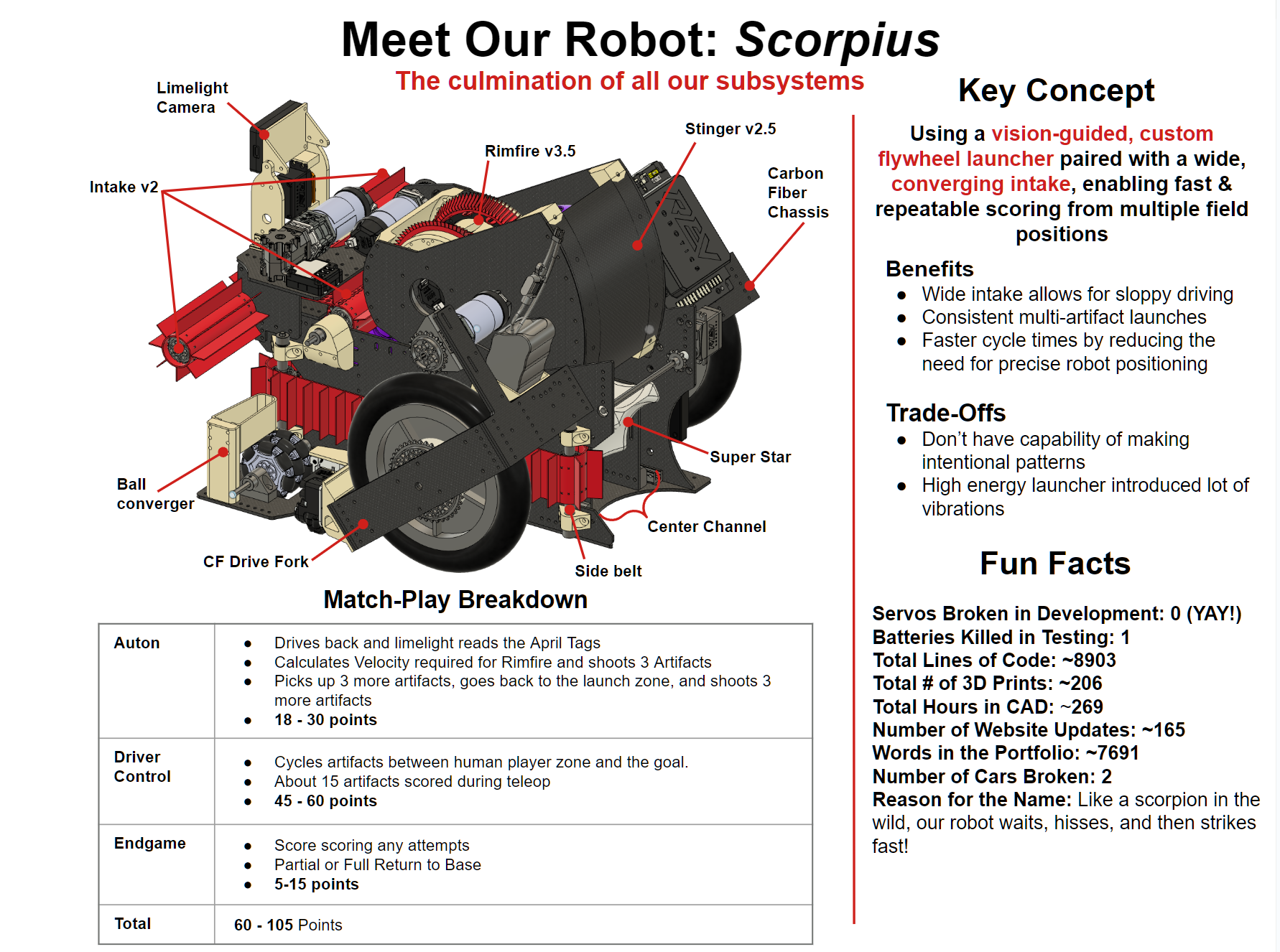
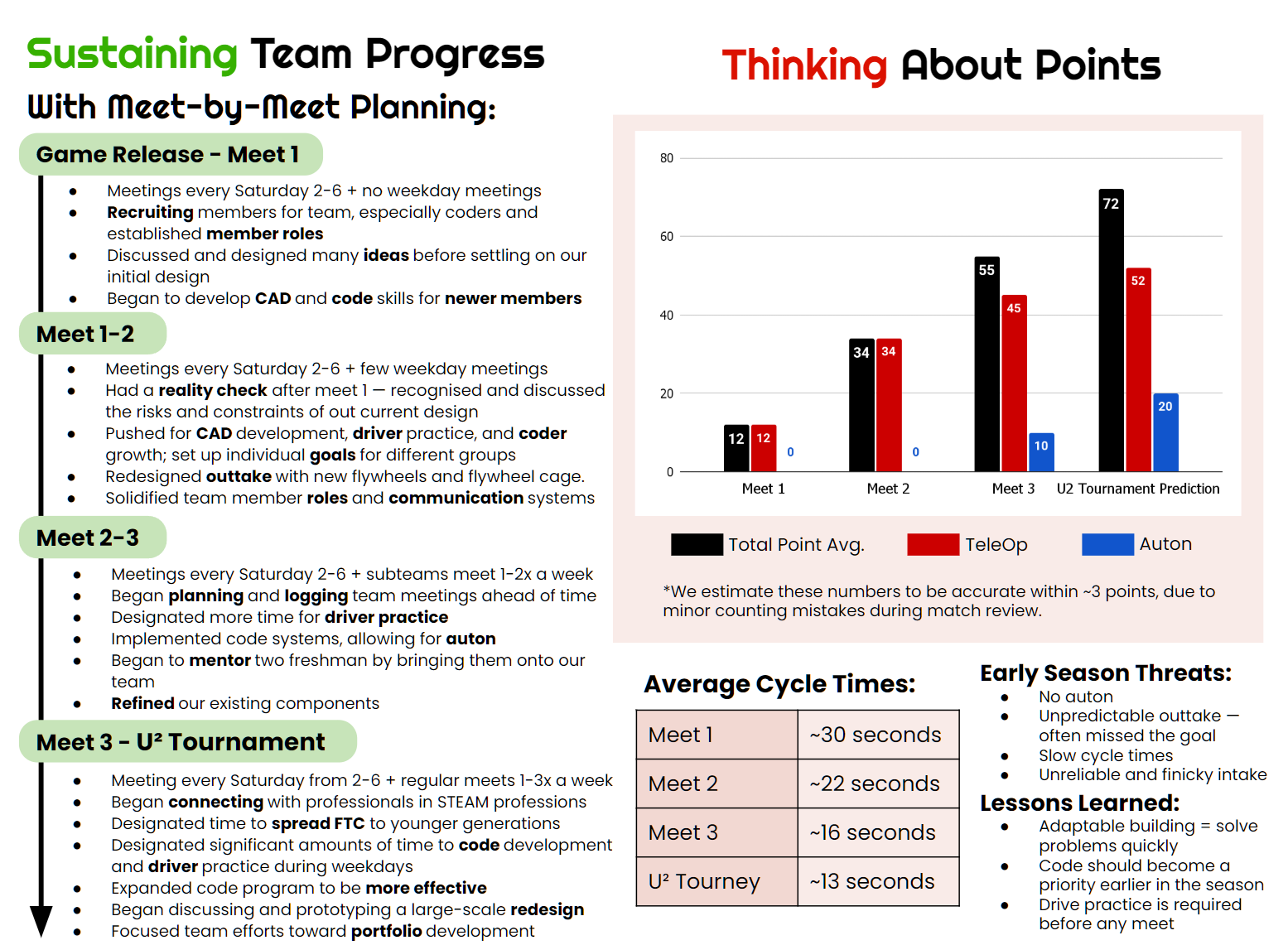
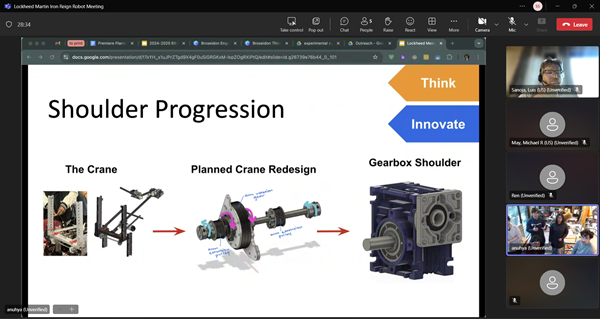
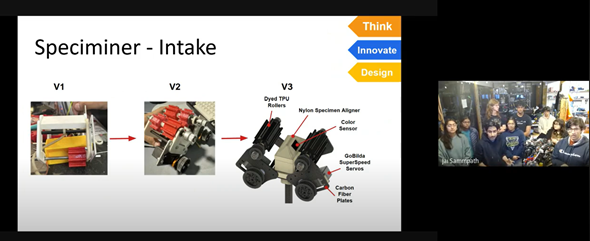
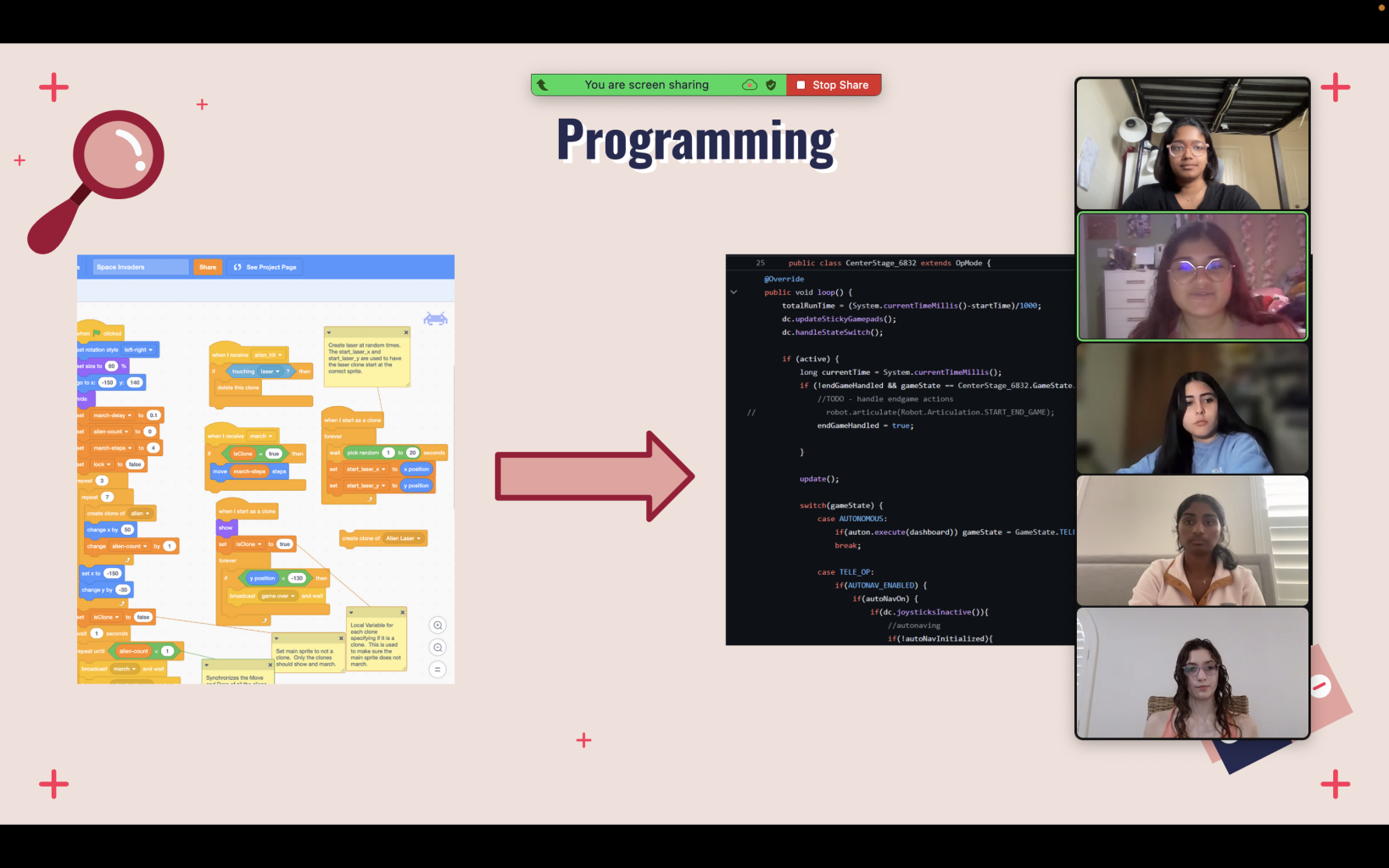
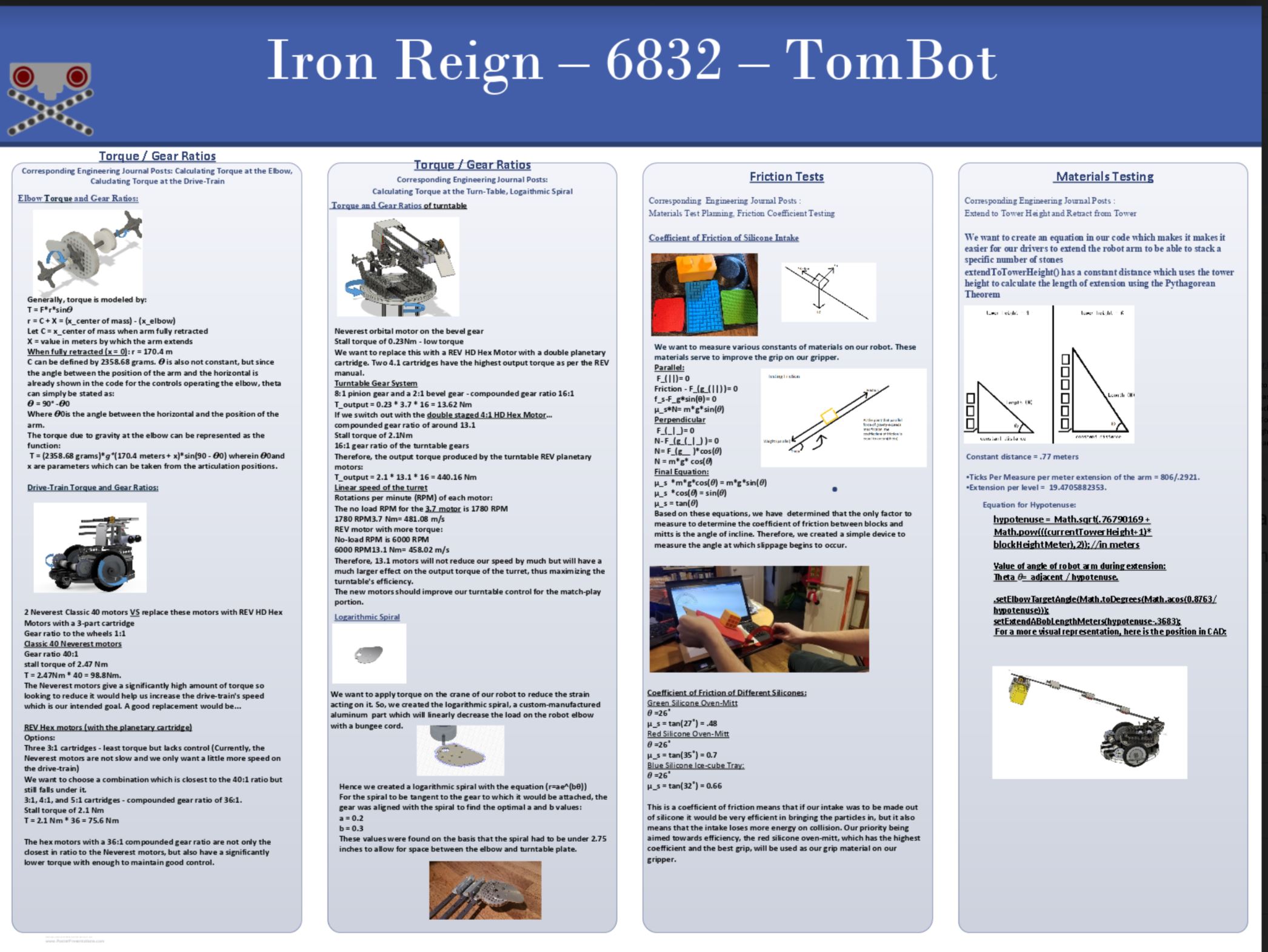
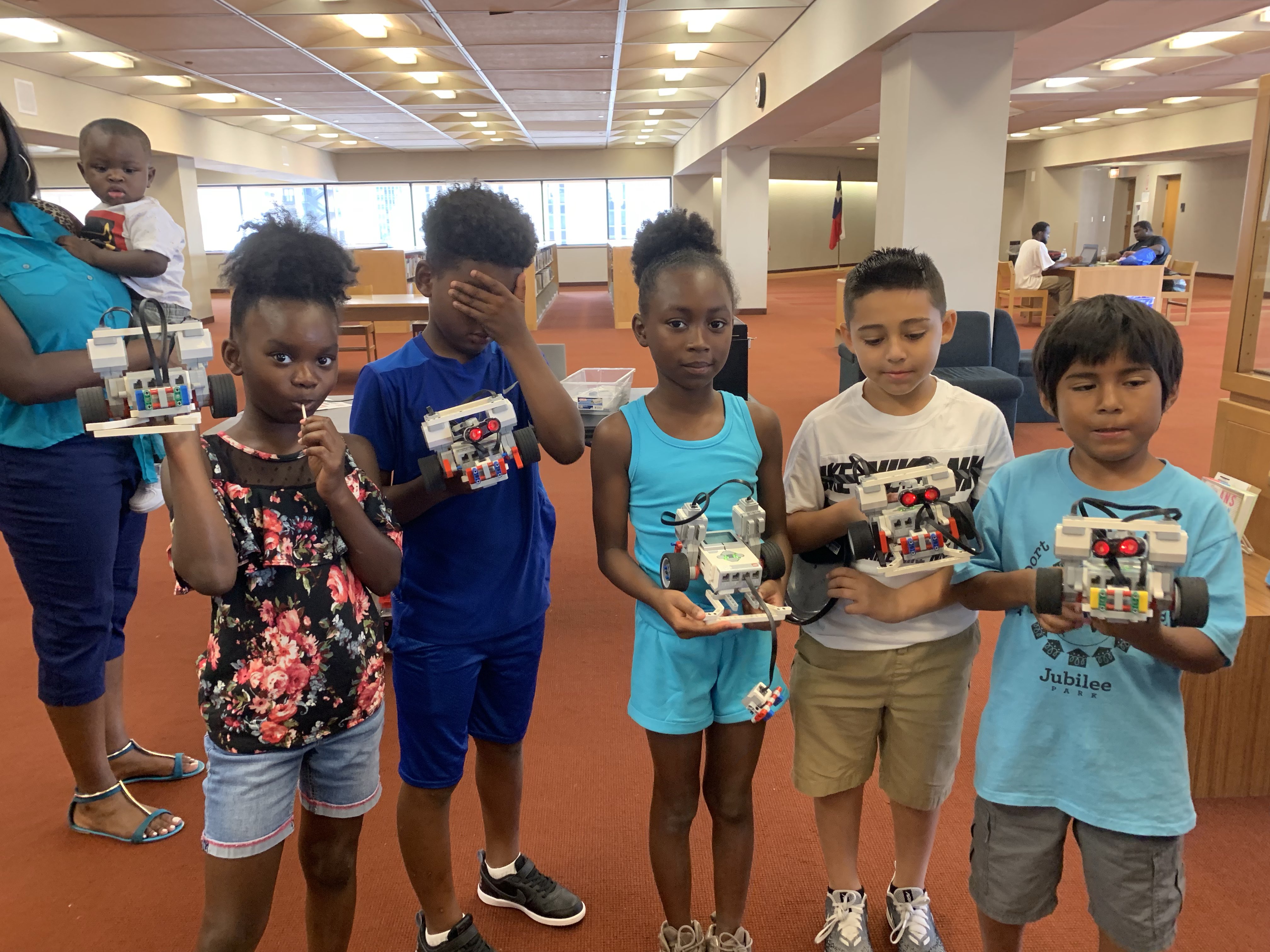
Proof we execute (design speed, performance gains, and community impact)
Thank you for helping students build real engineering skills — and for keeping our season alive!


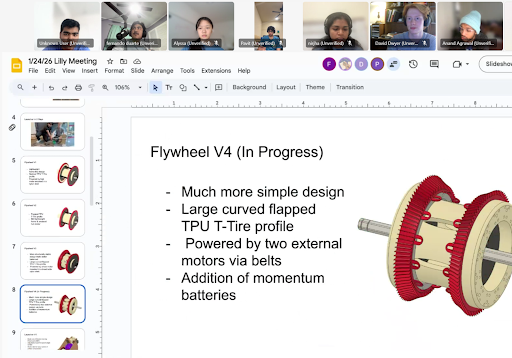


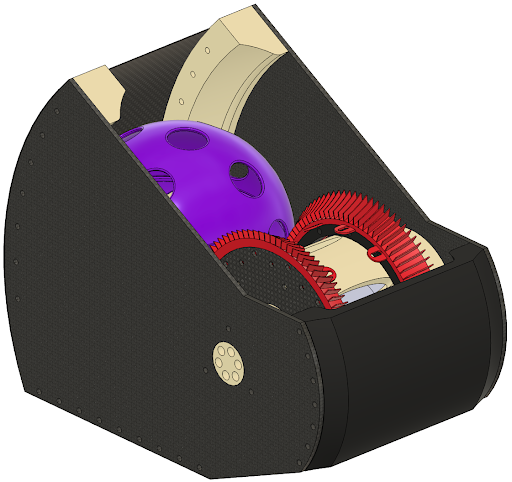

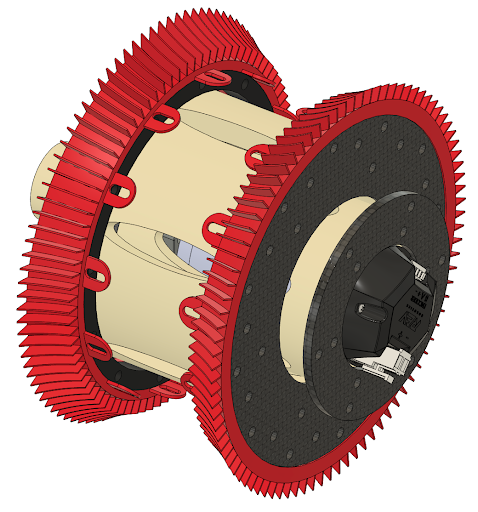
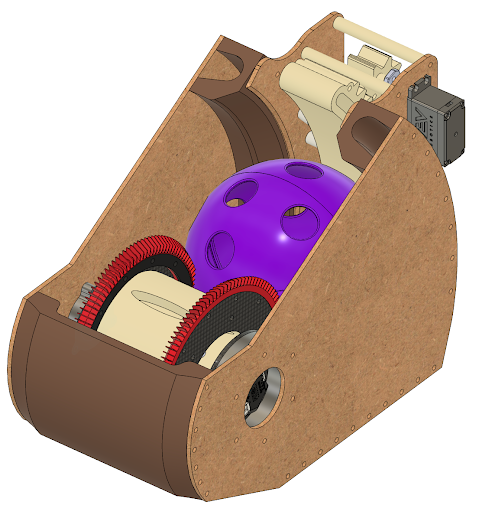
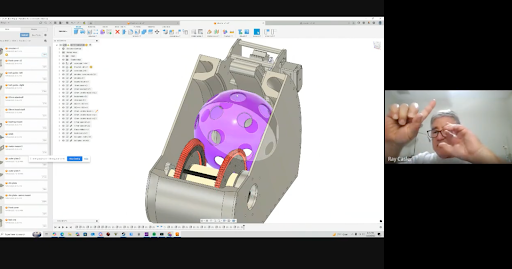
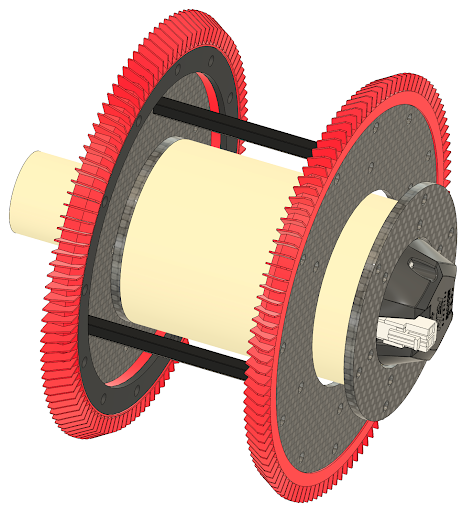
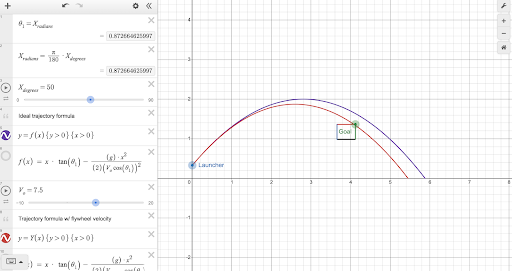












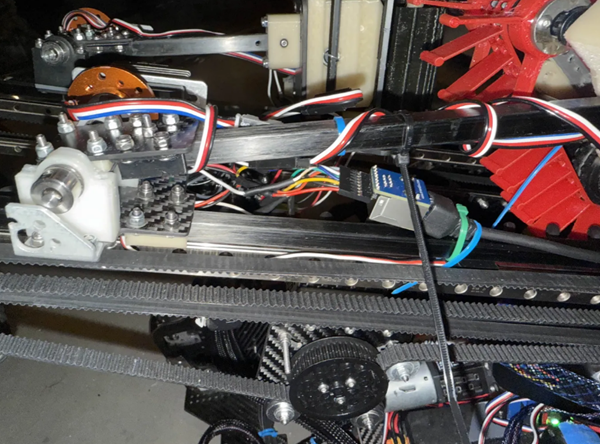
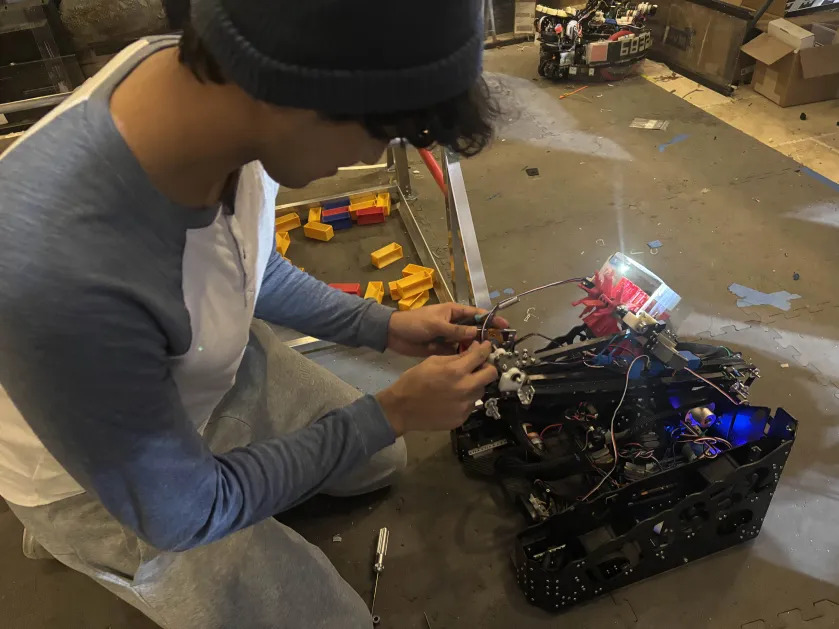
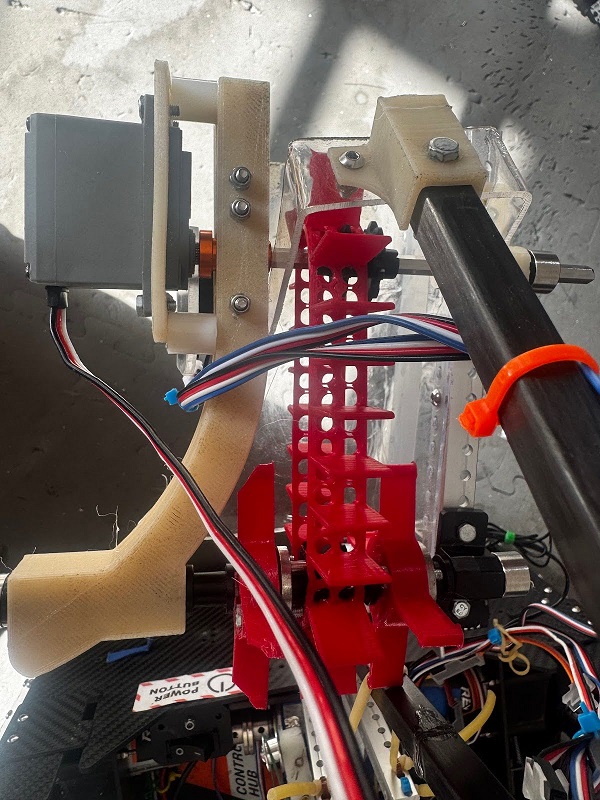
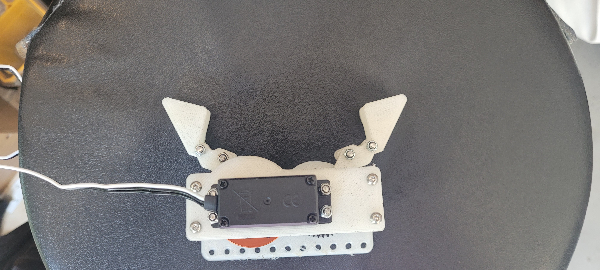
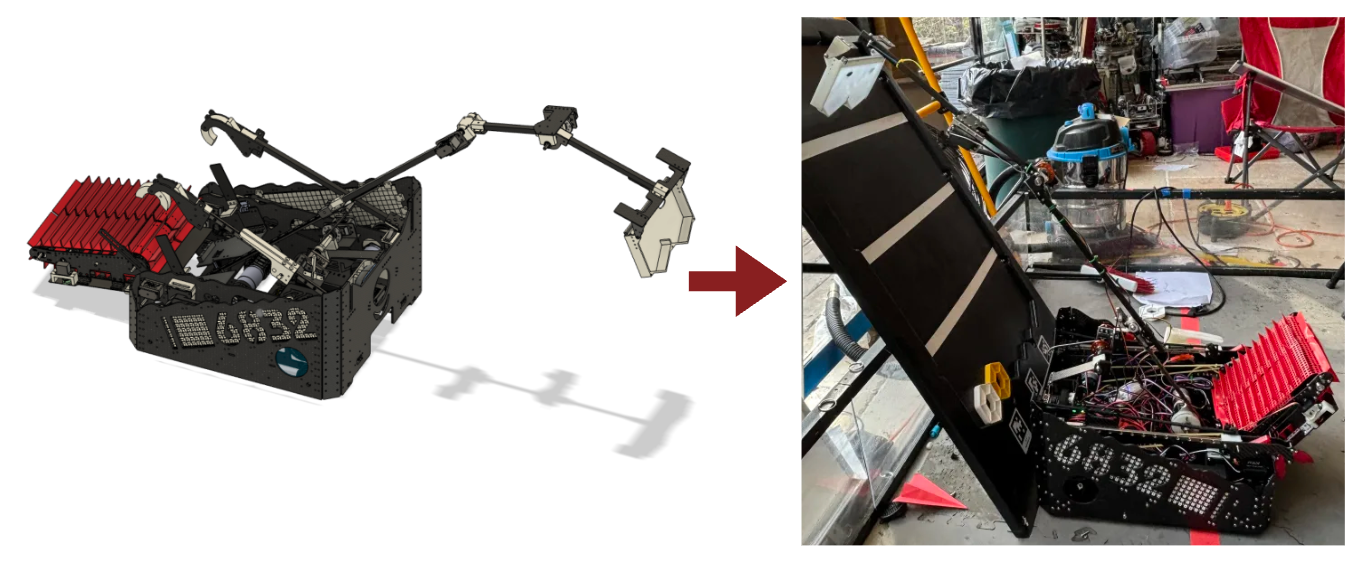
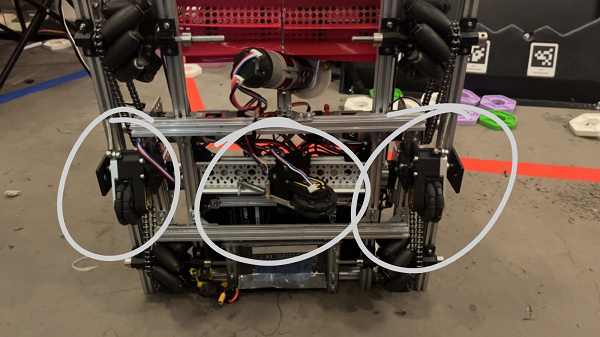
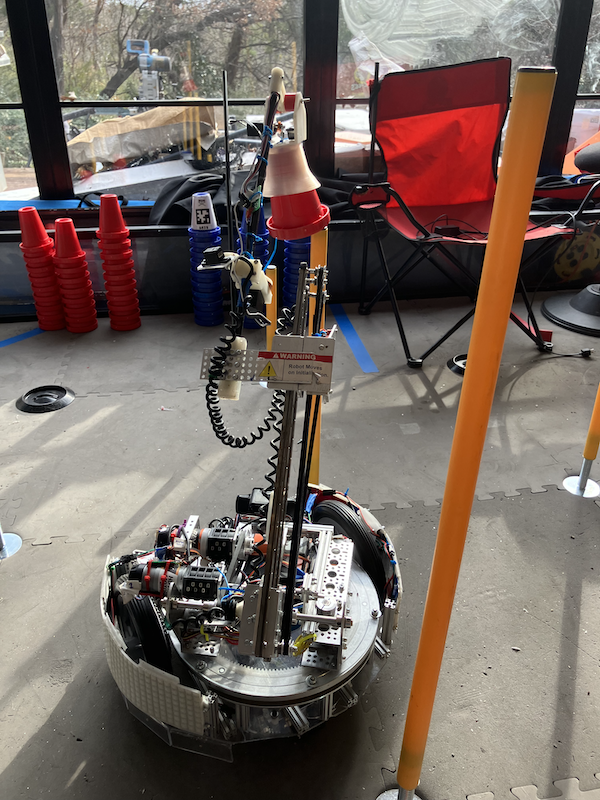
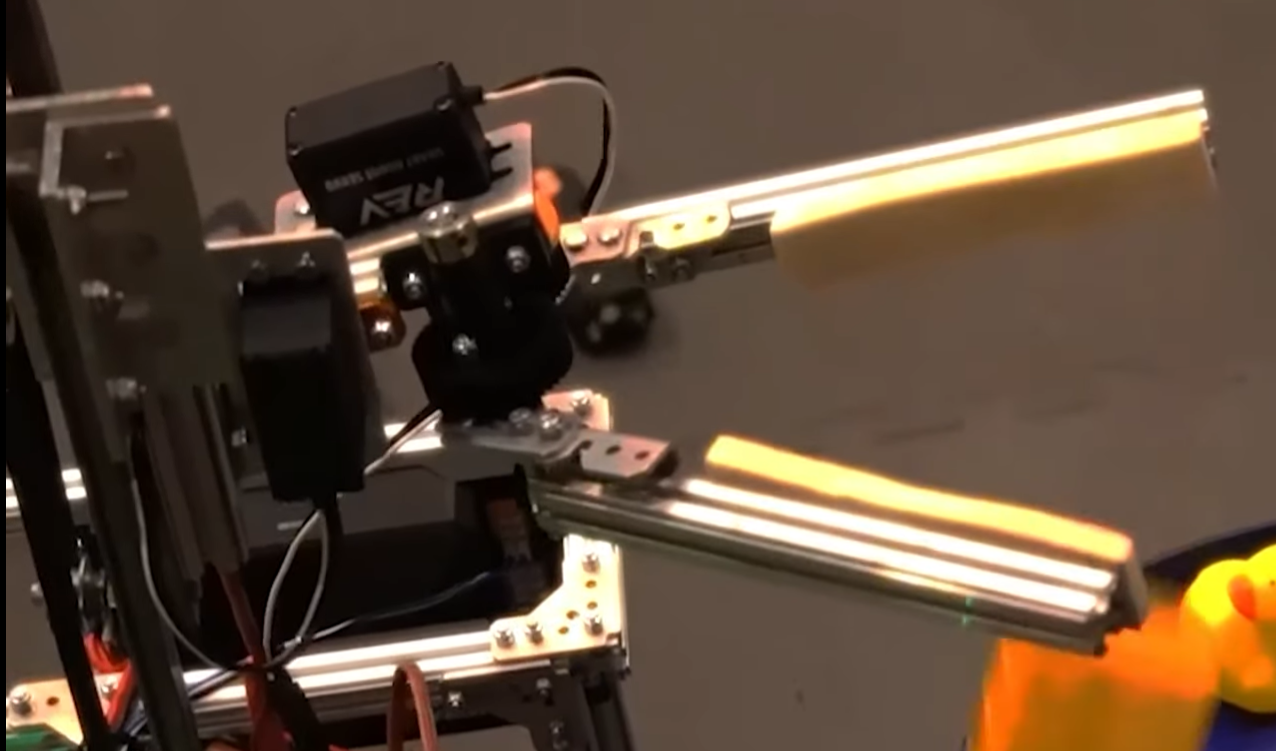
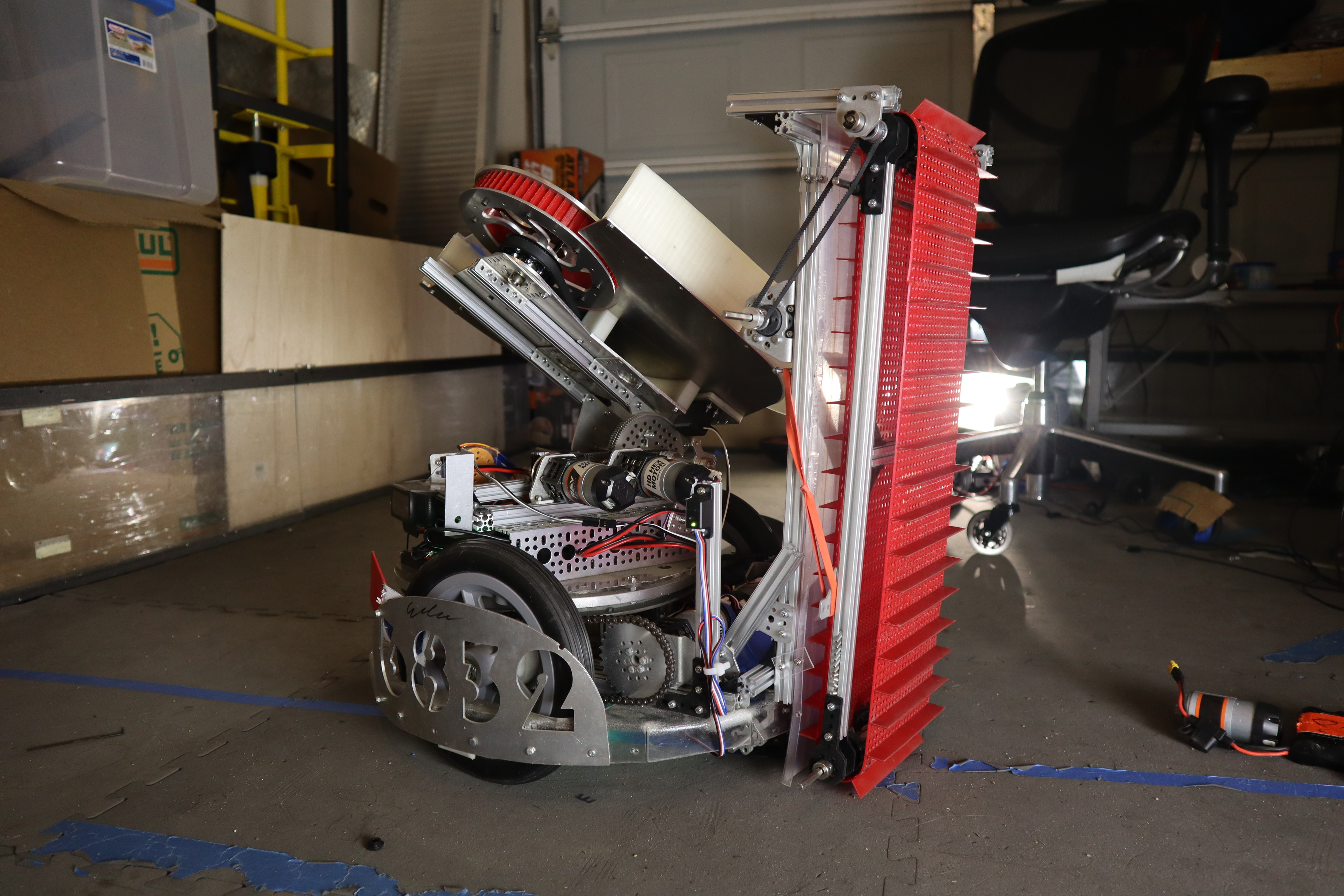
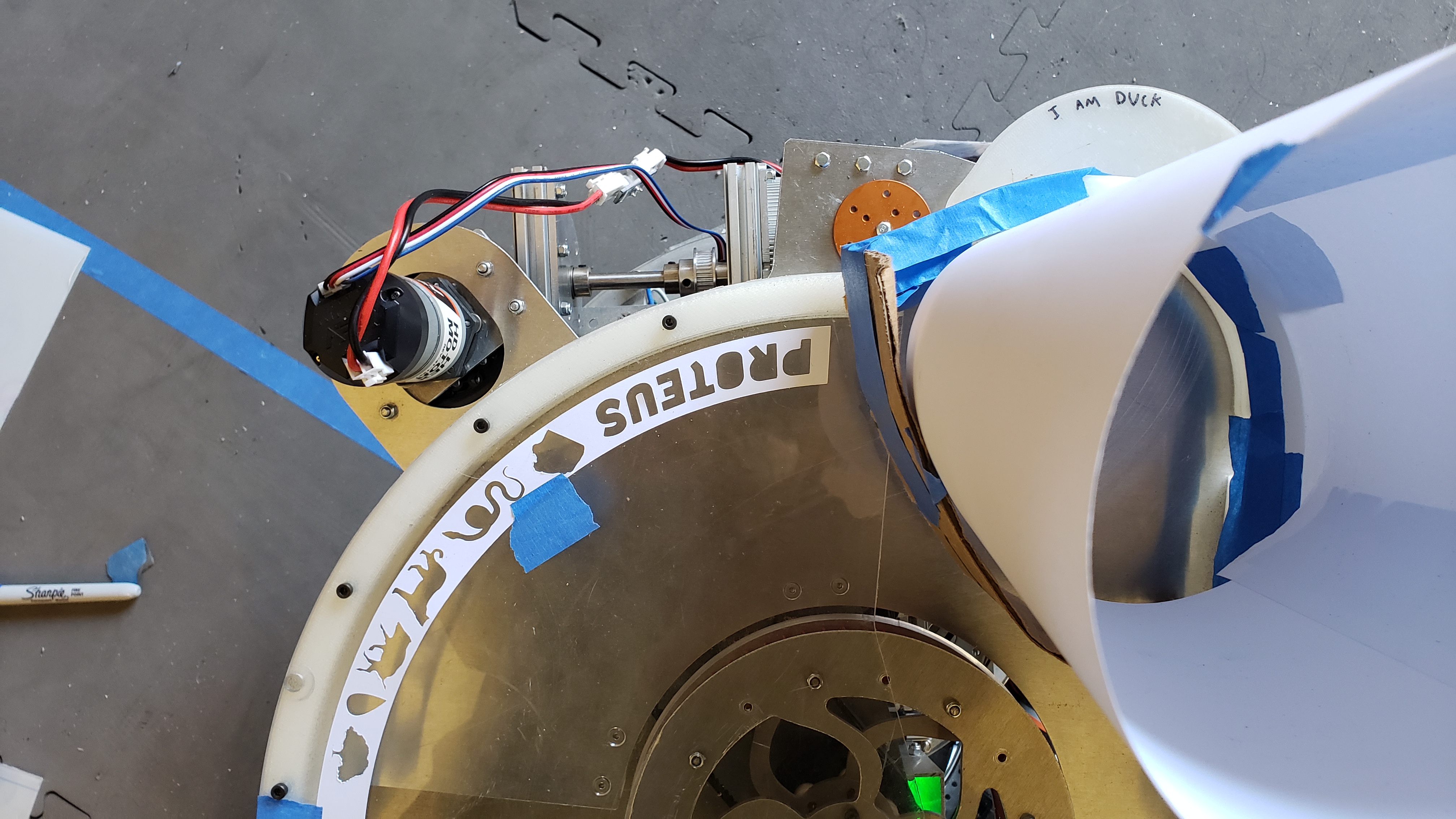
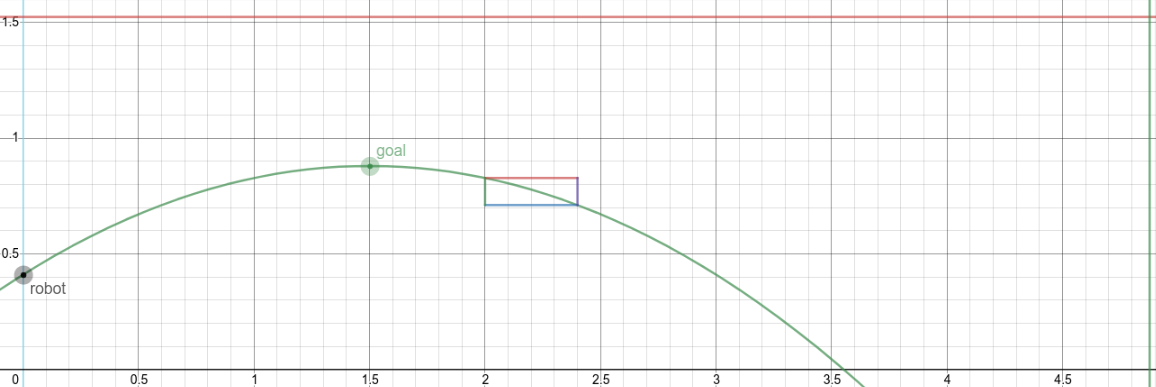
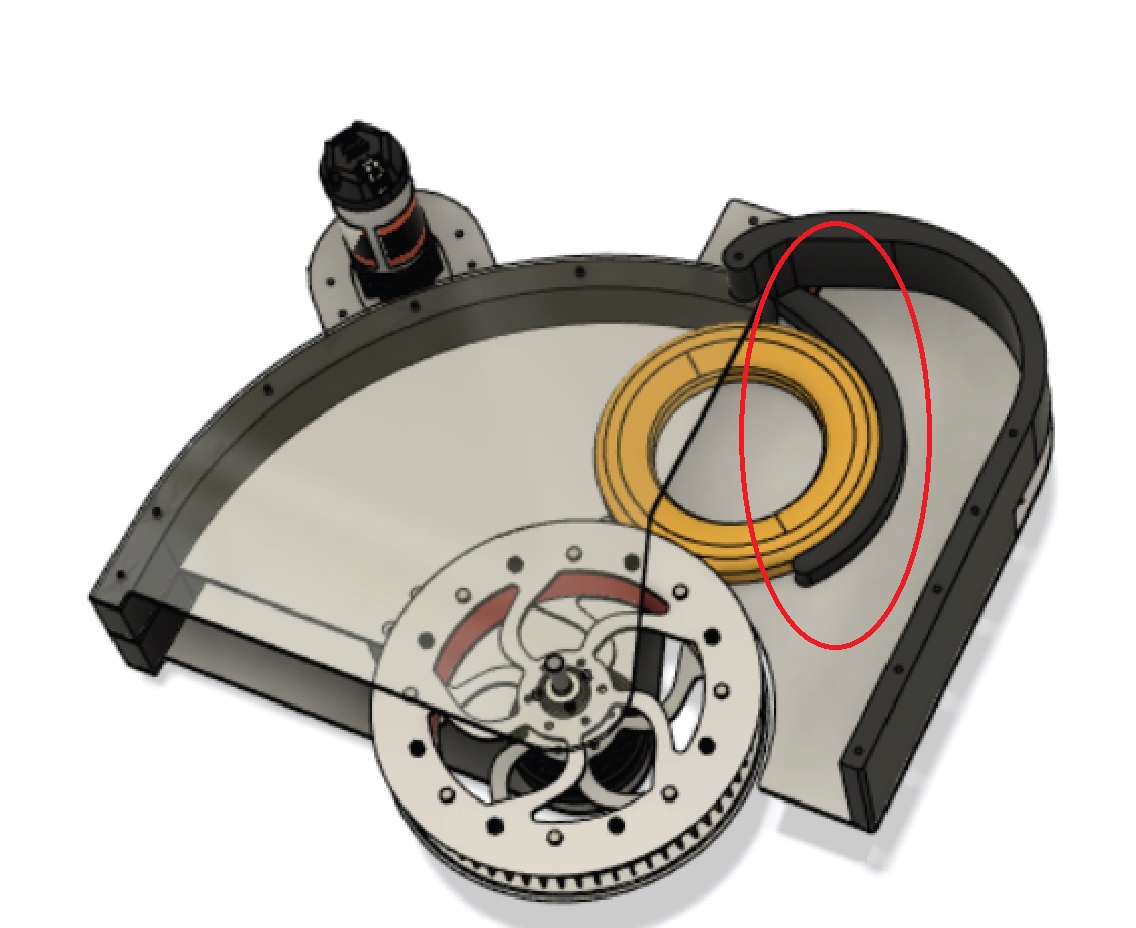
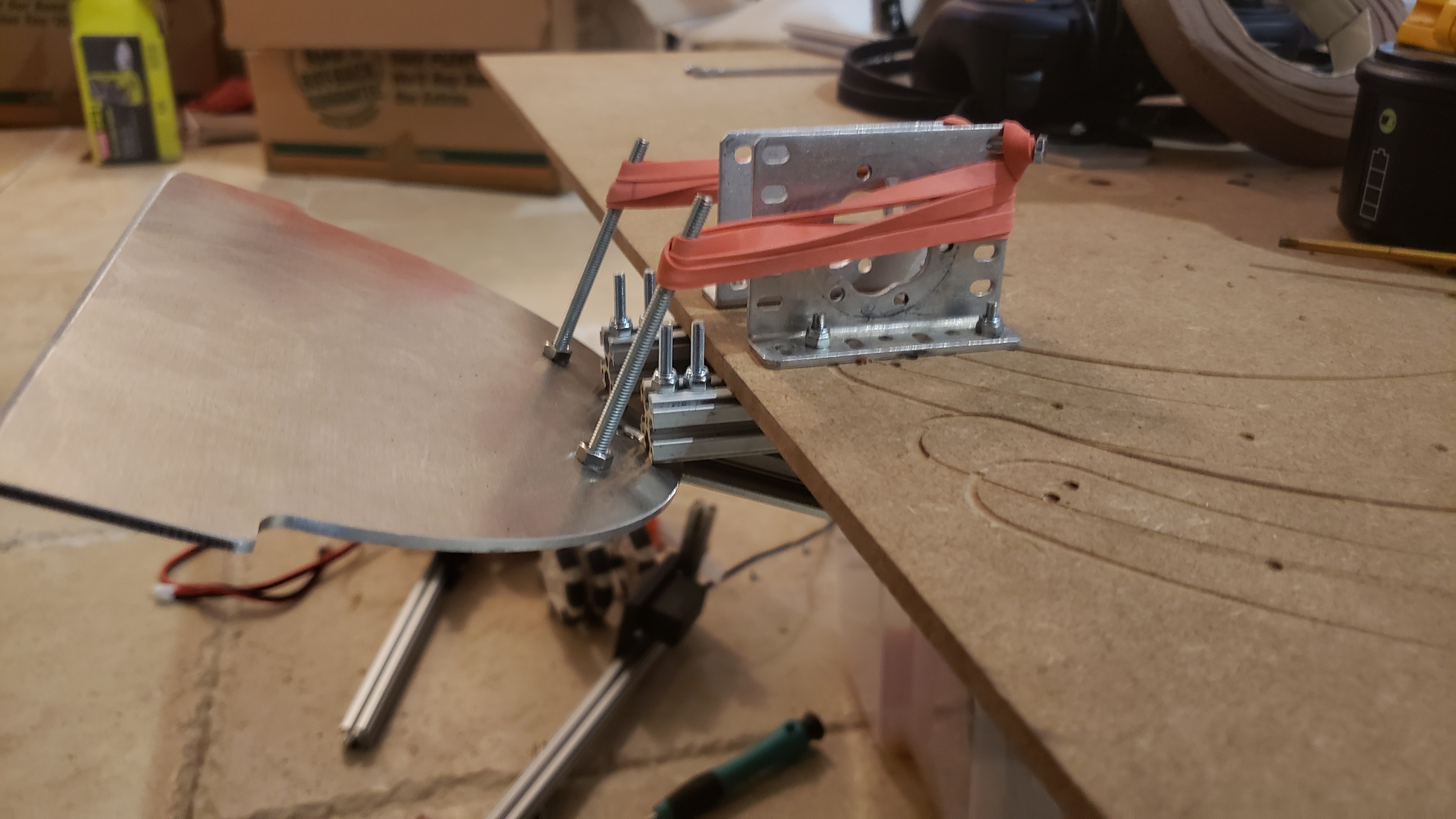
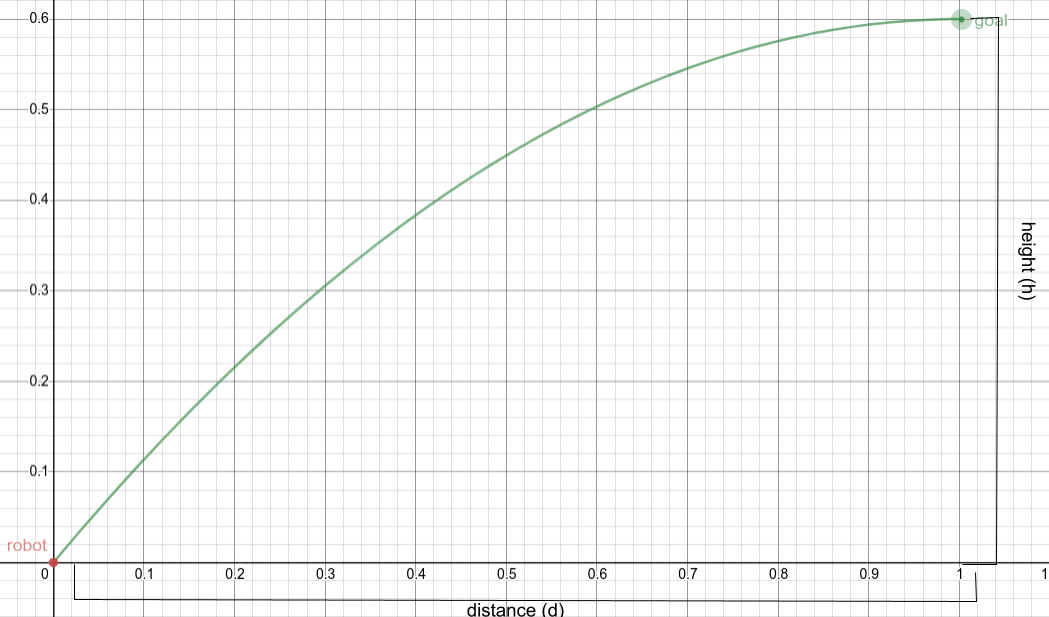
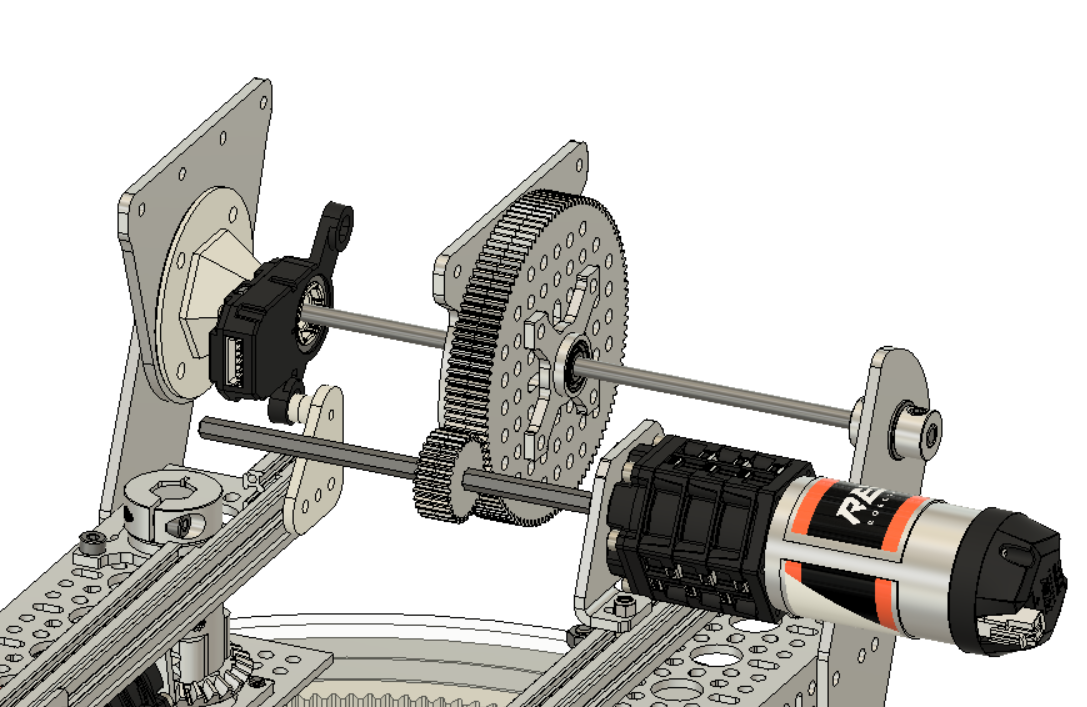
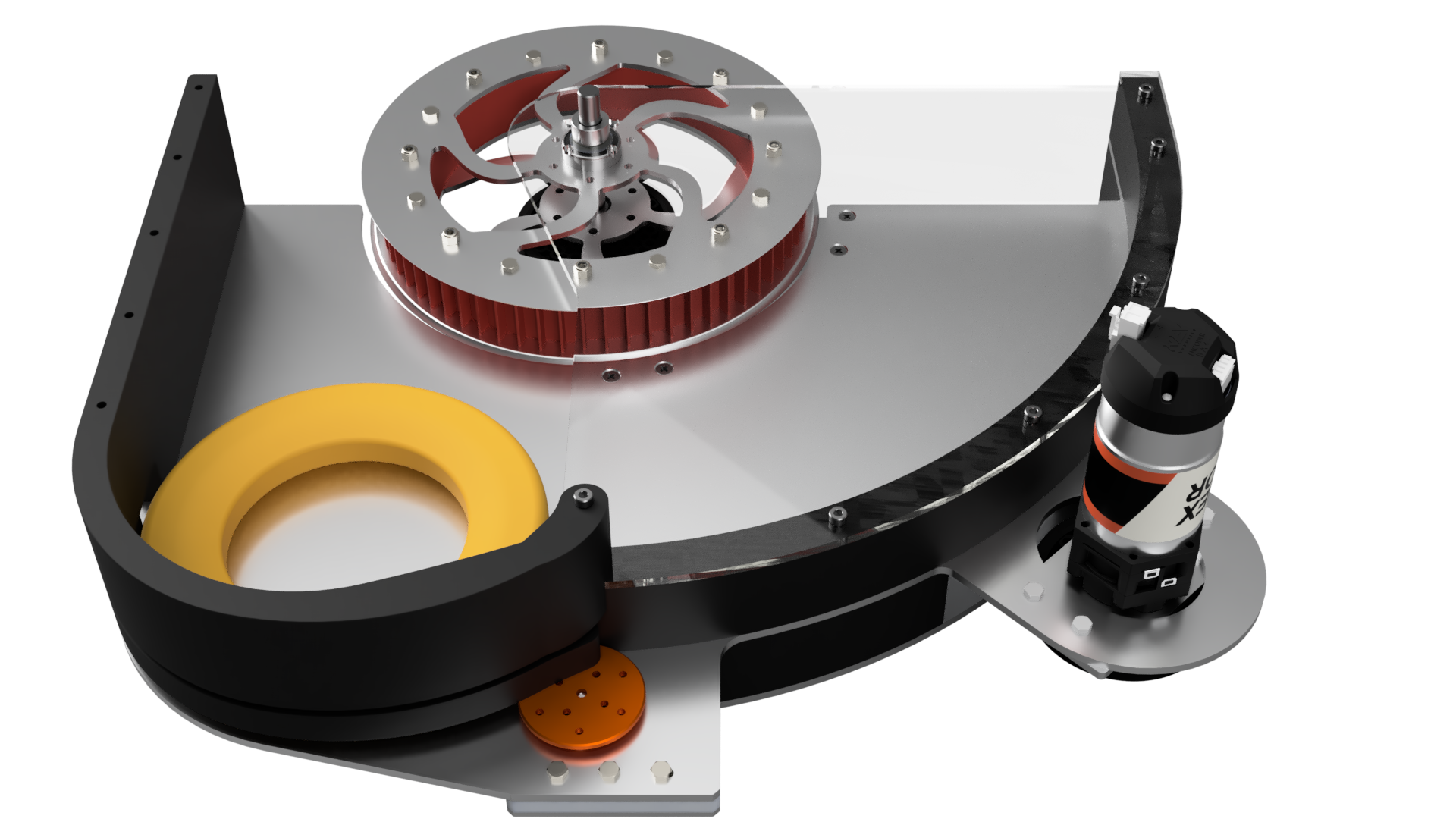
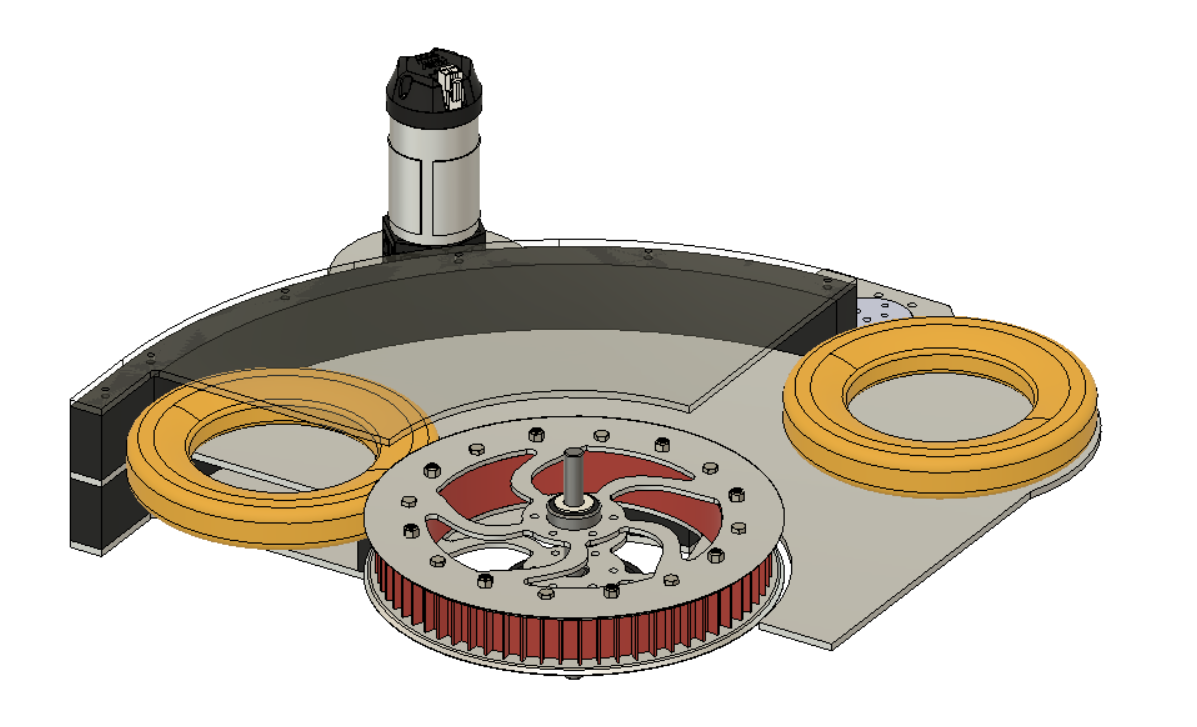
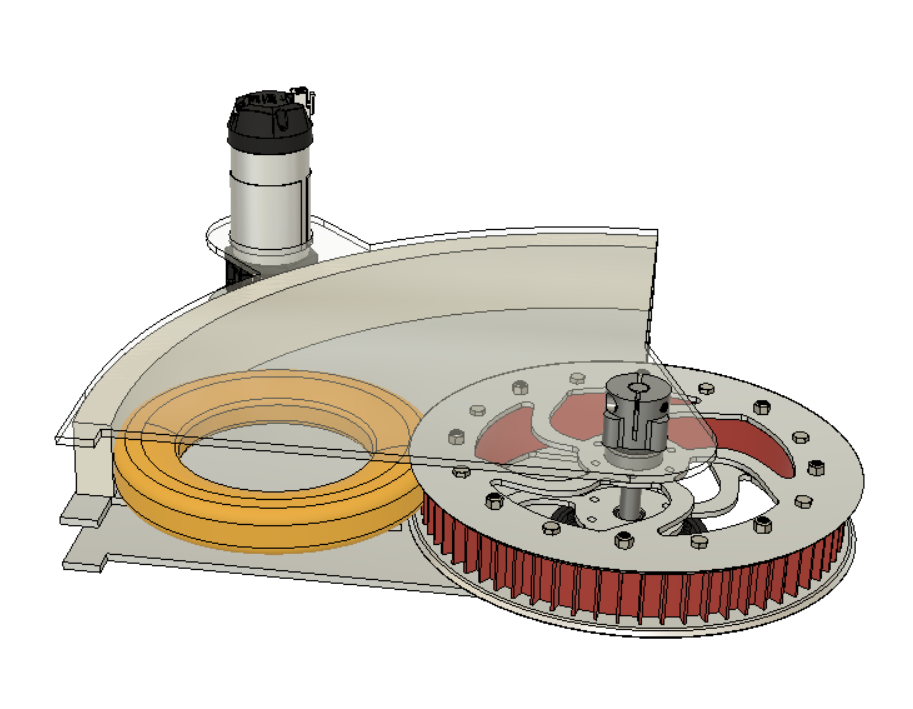
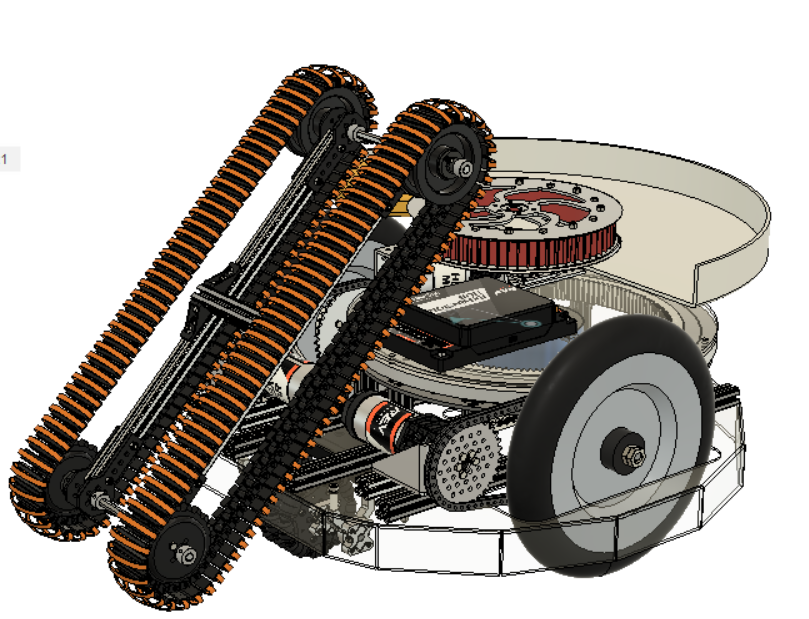
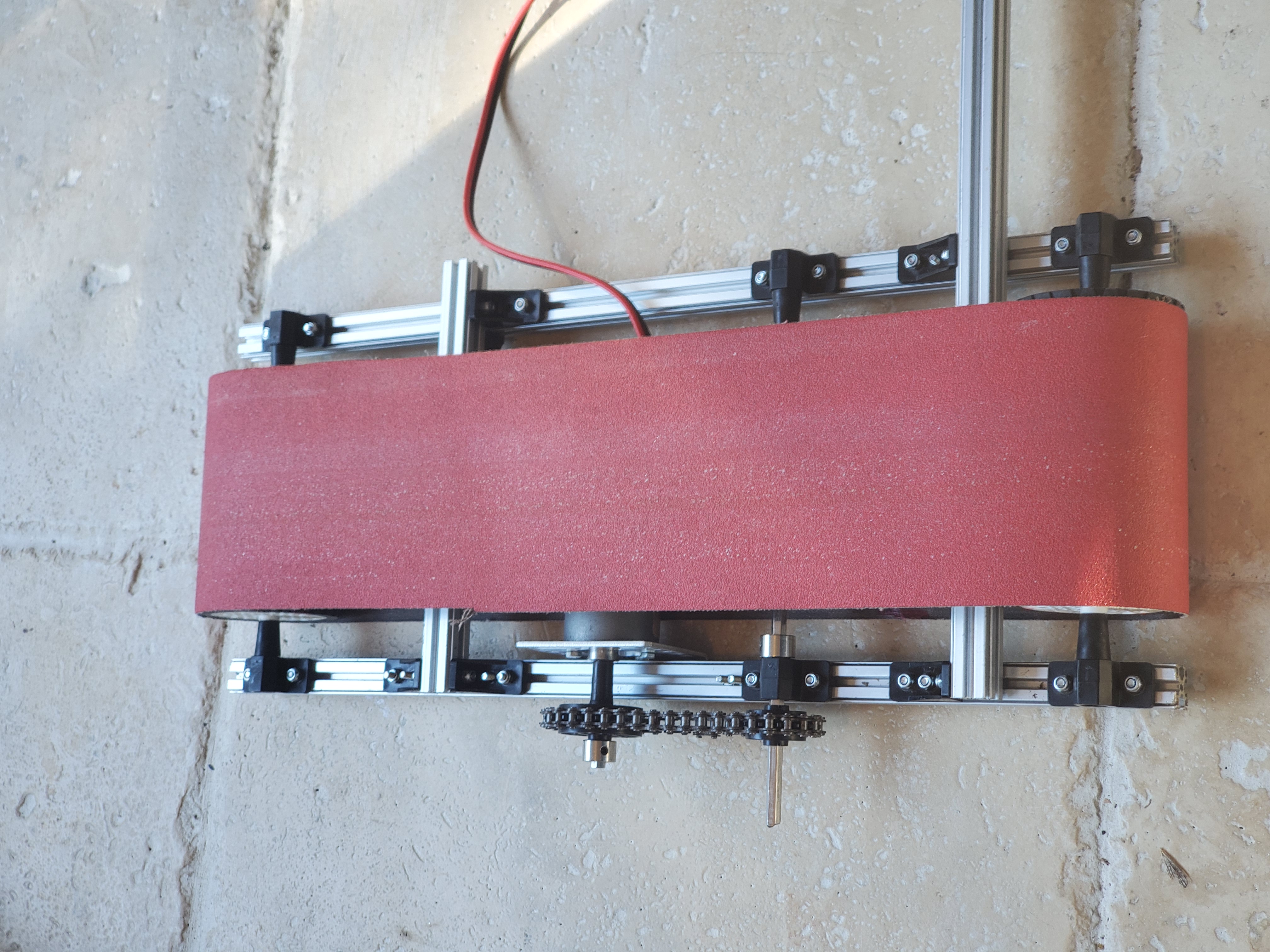
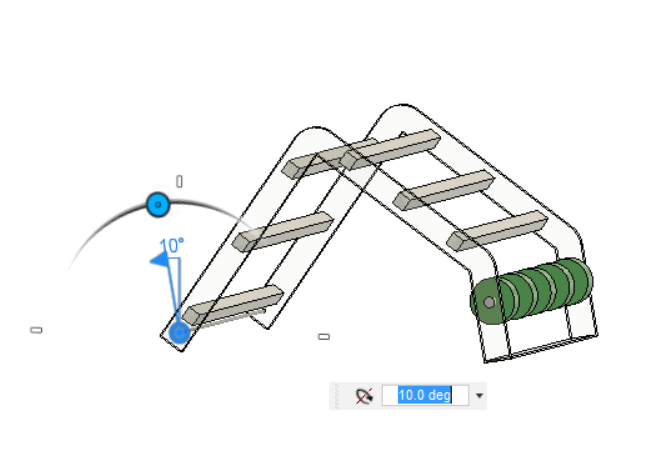
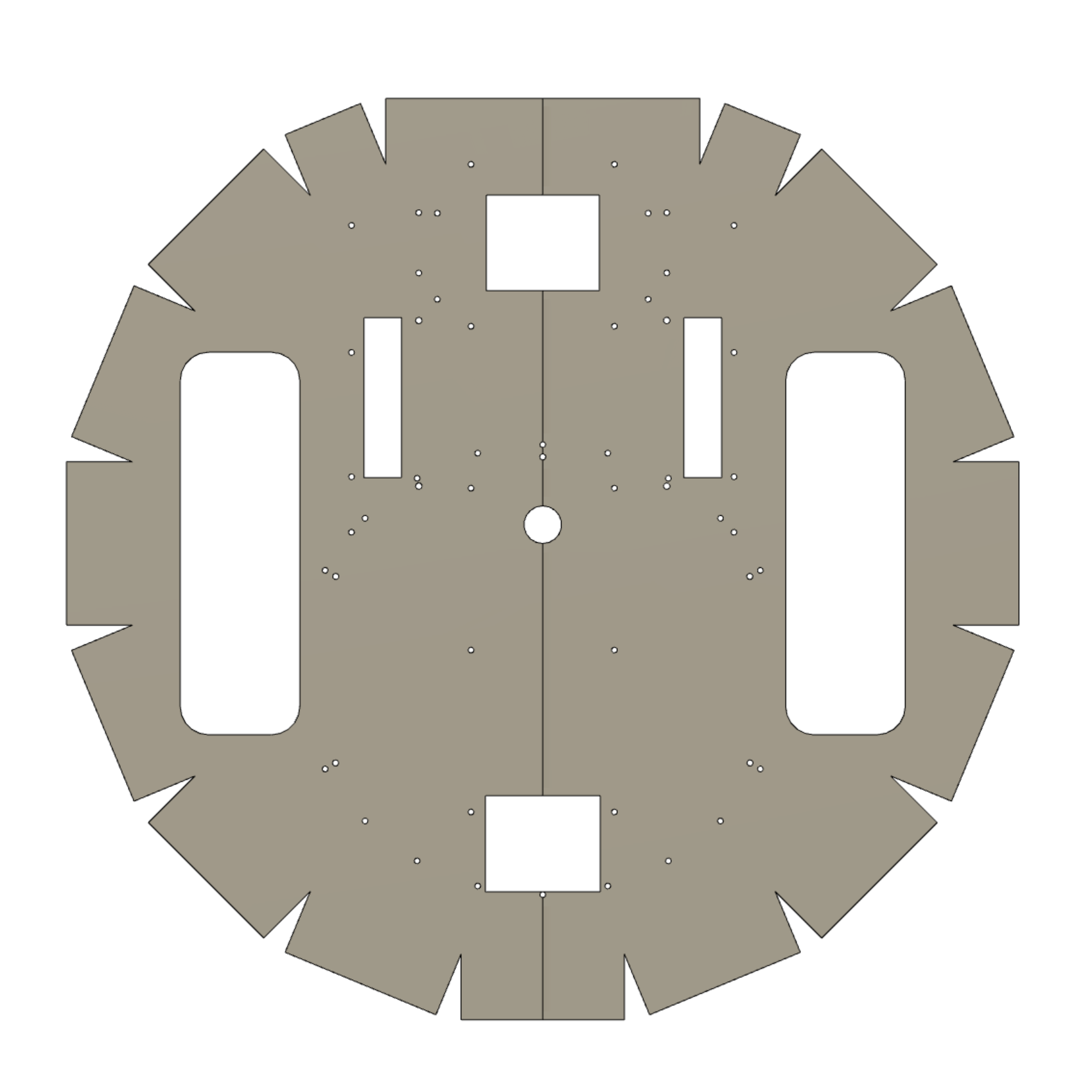
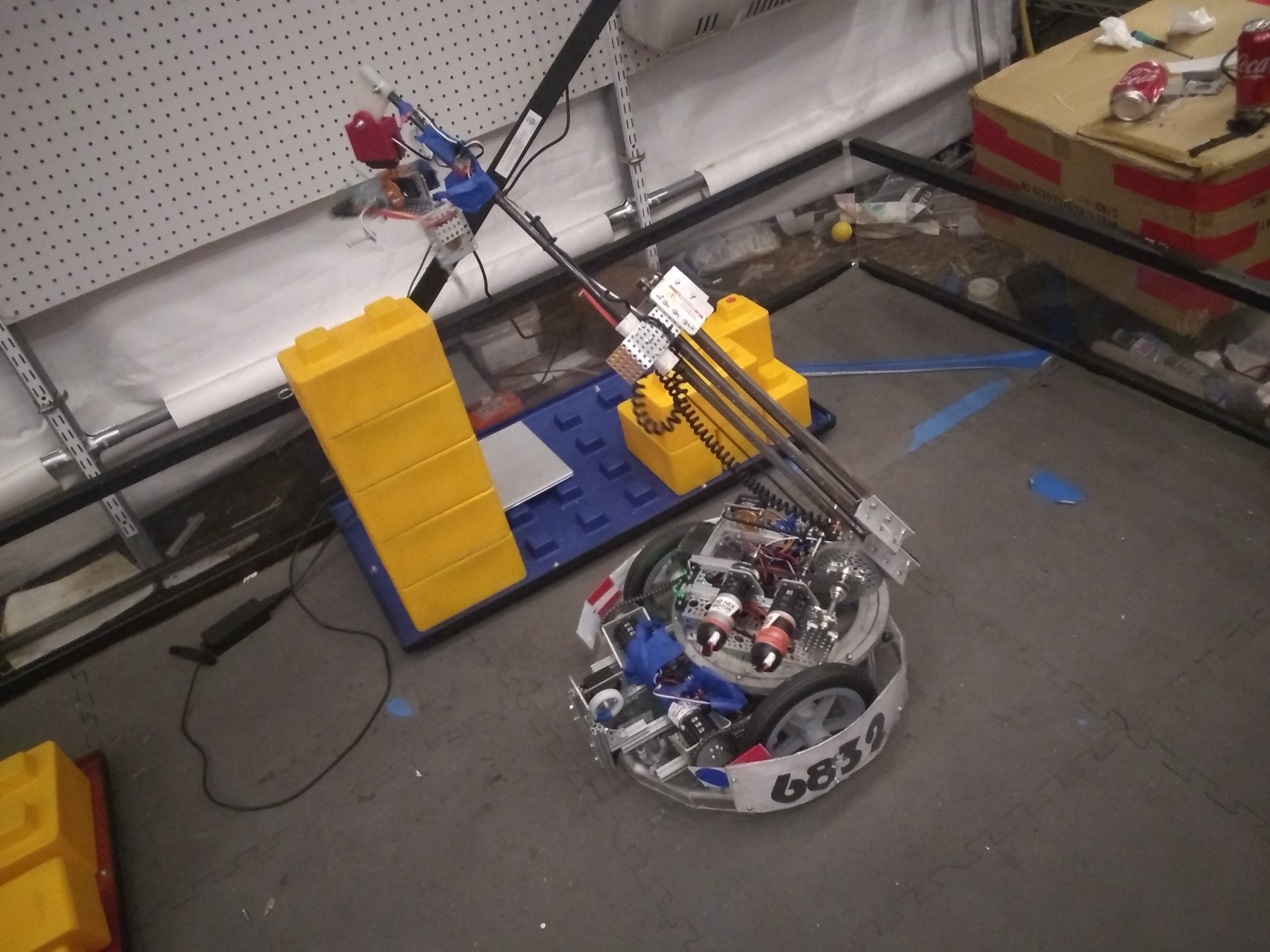
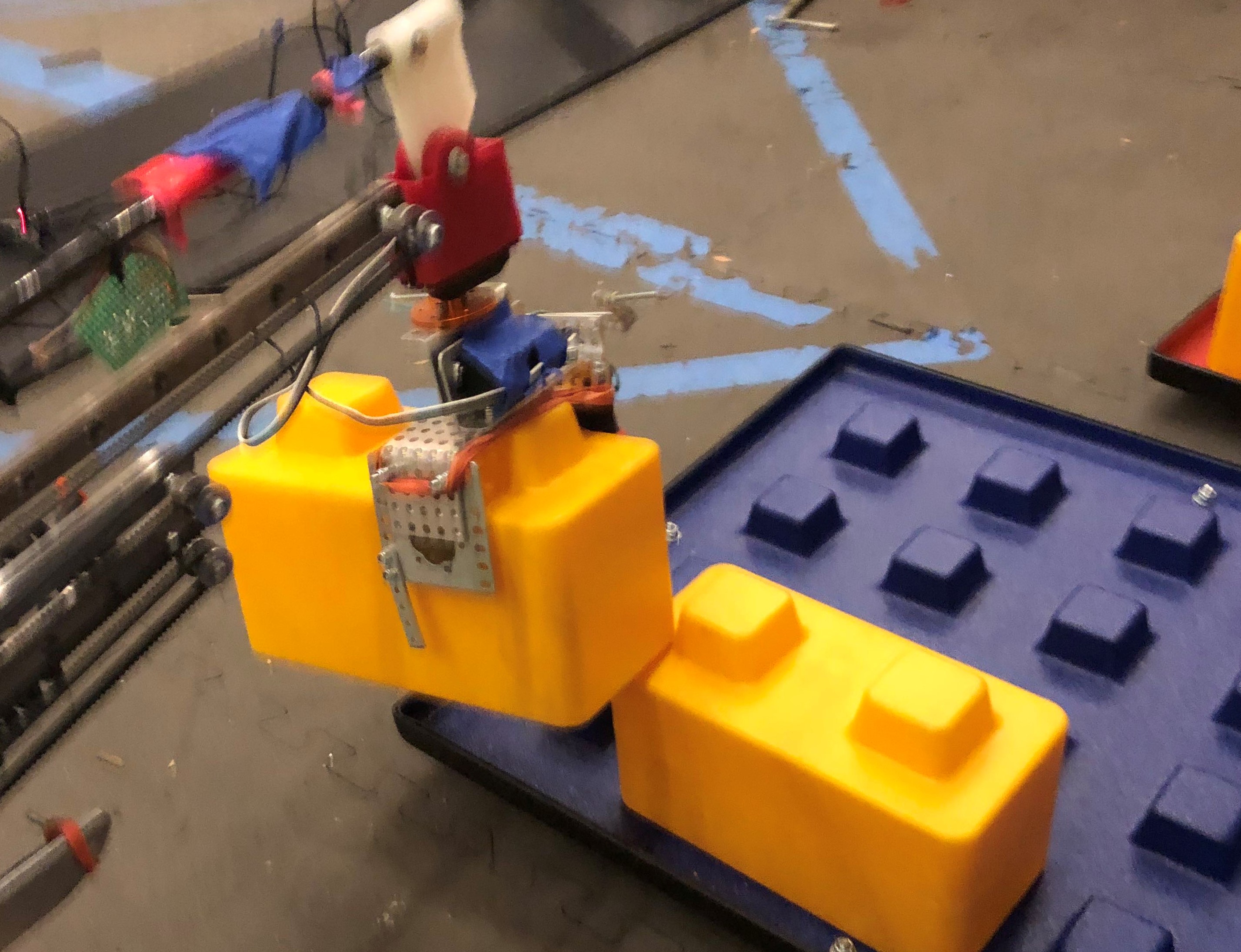
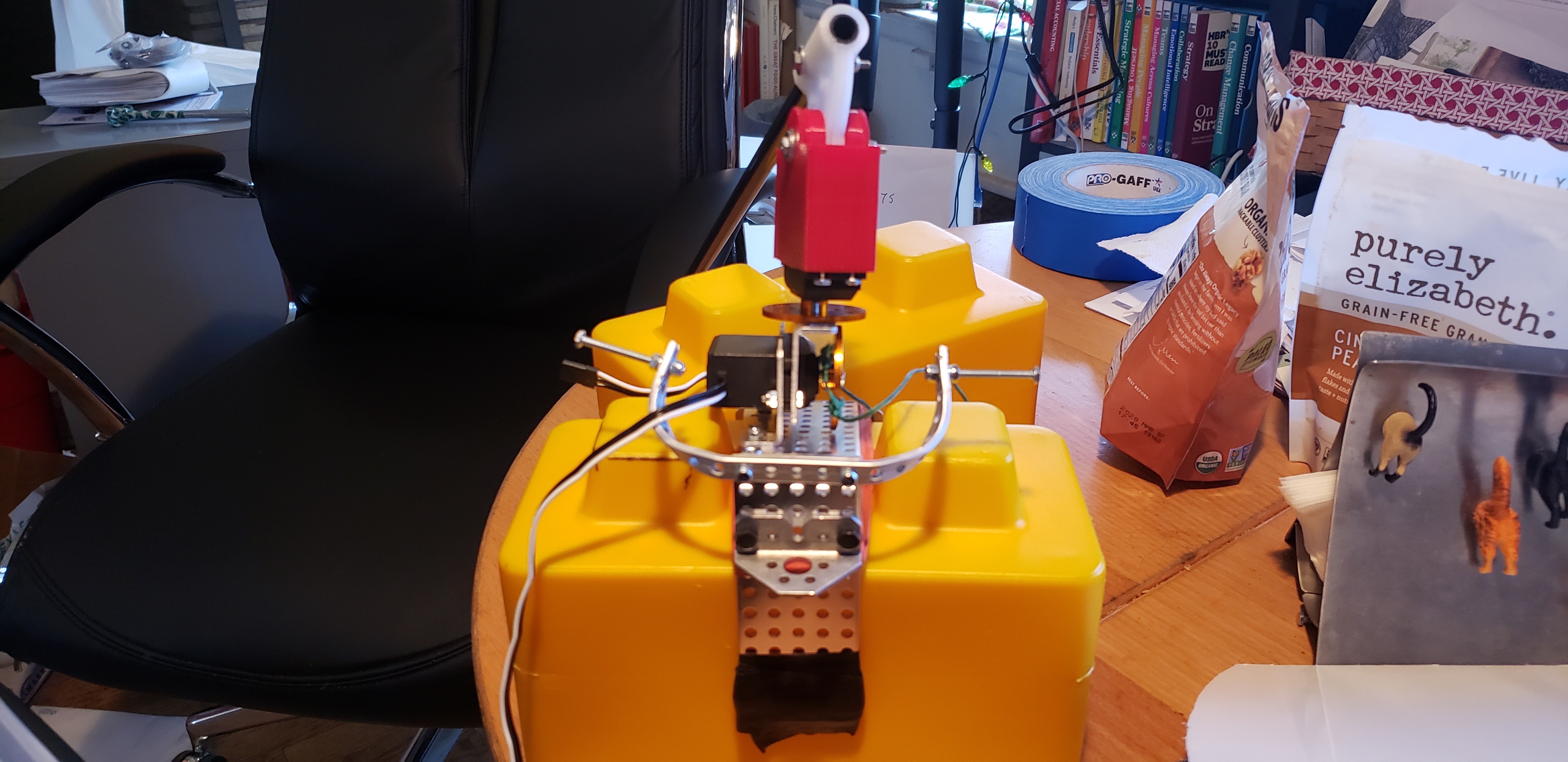
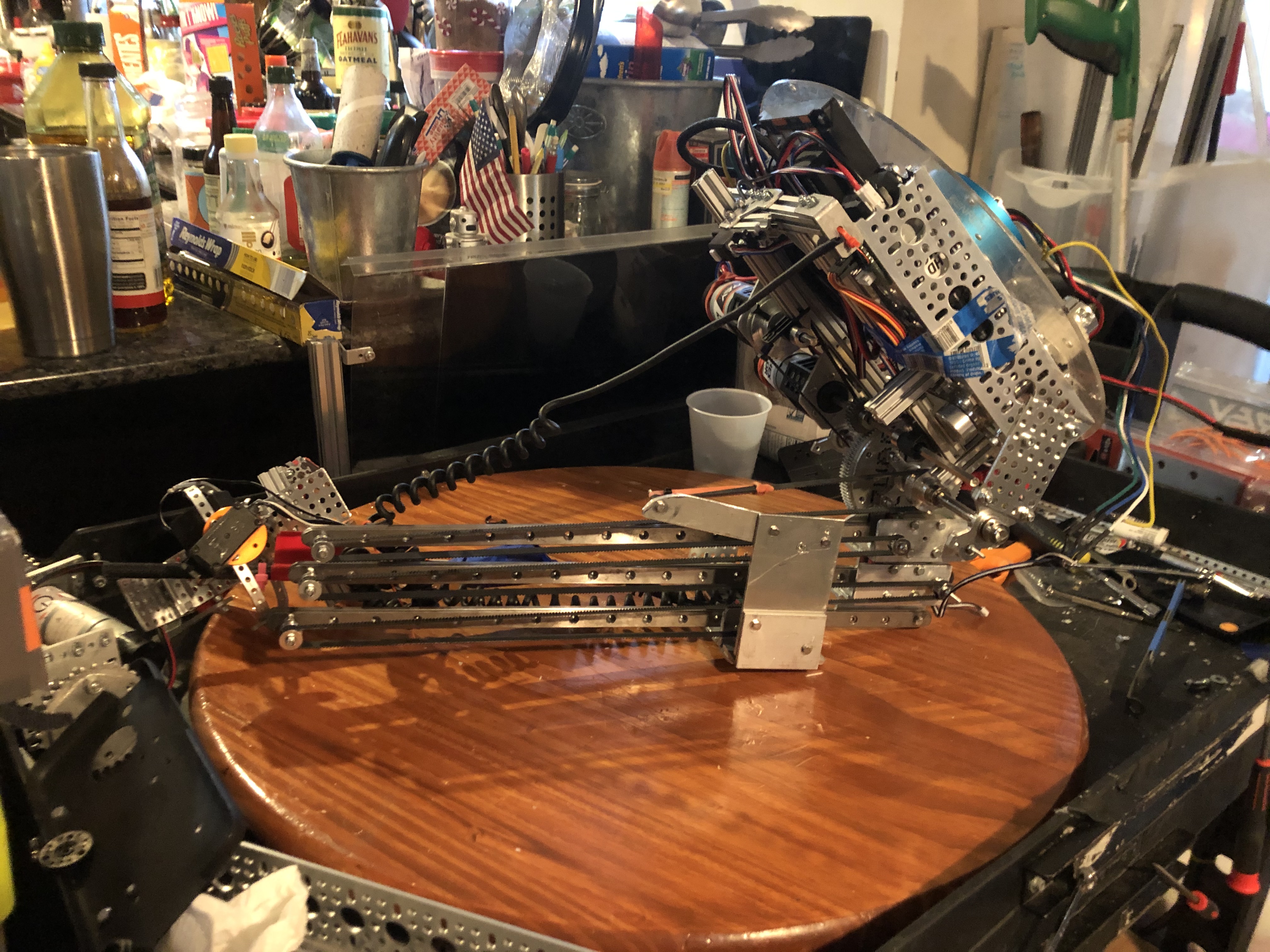
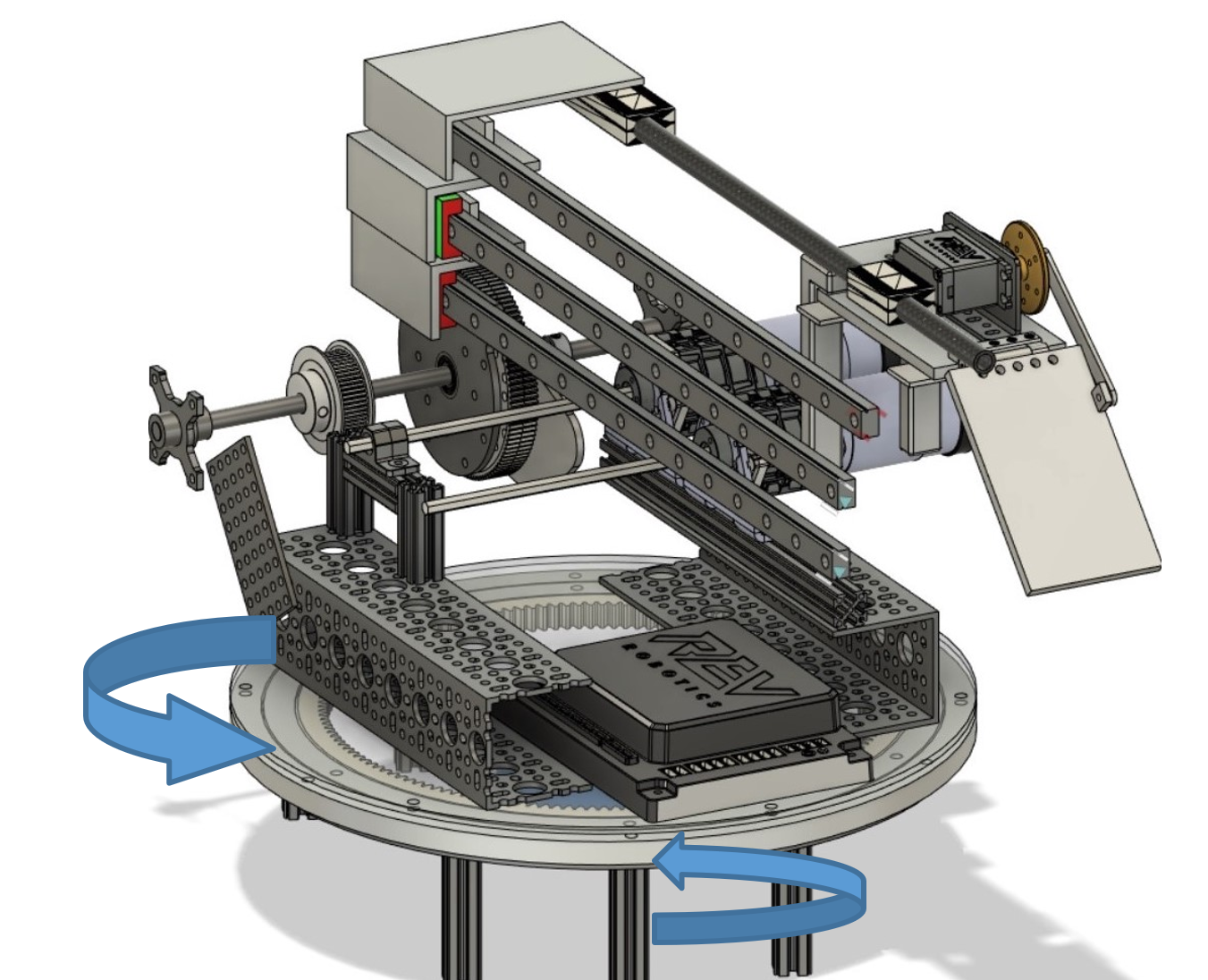
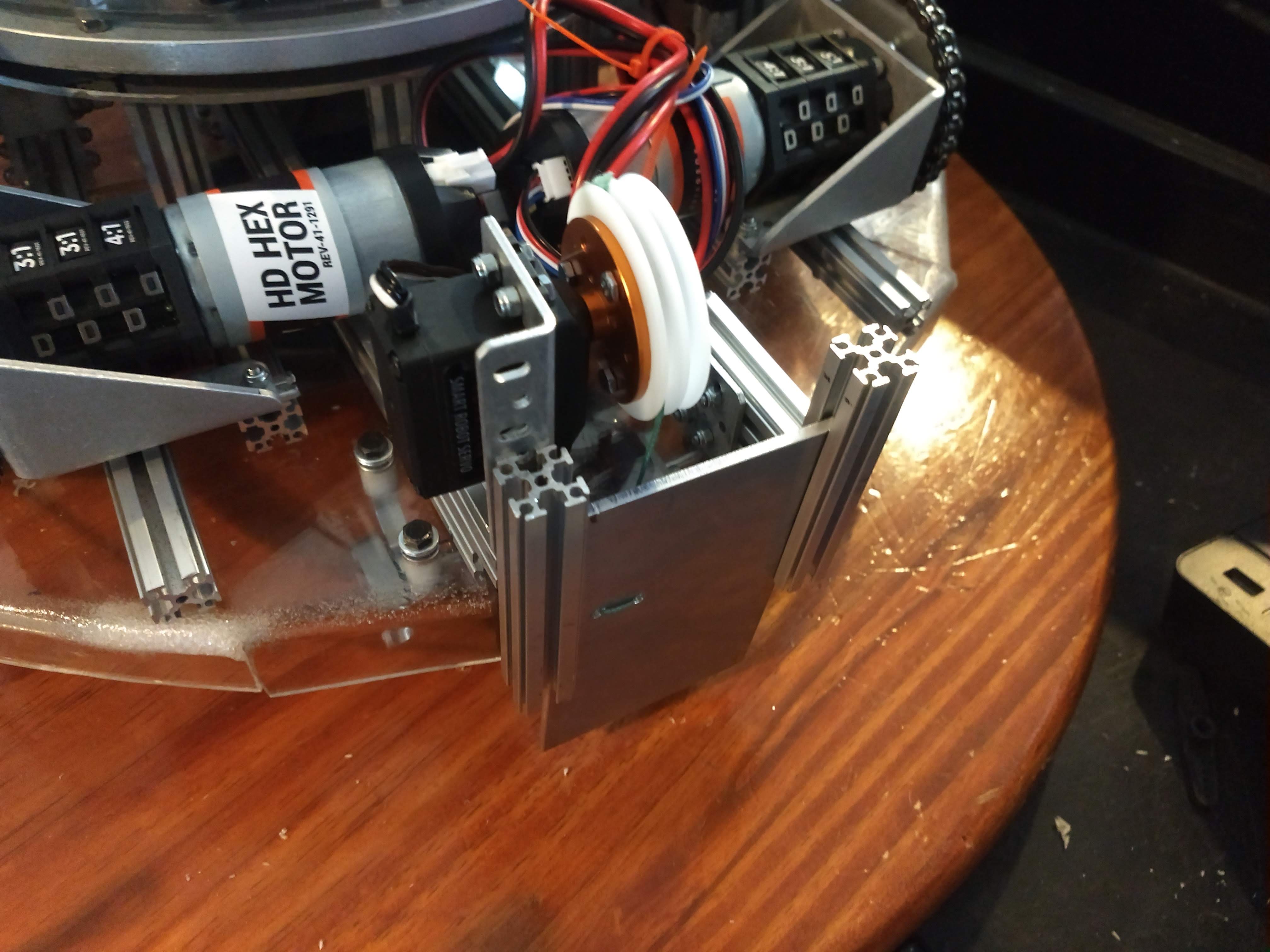
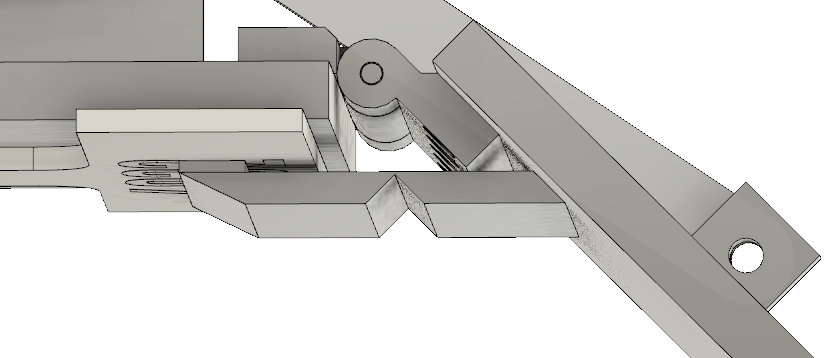
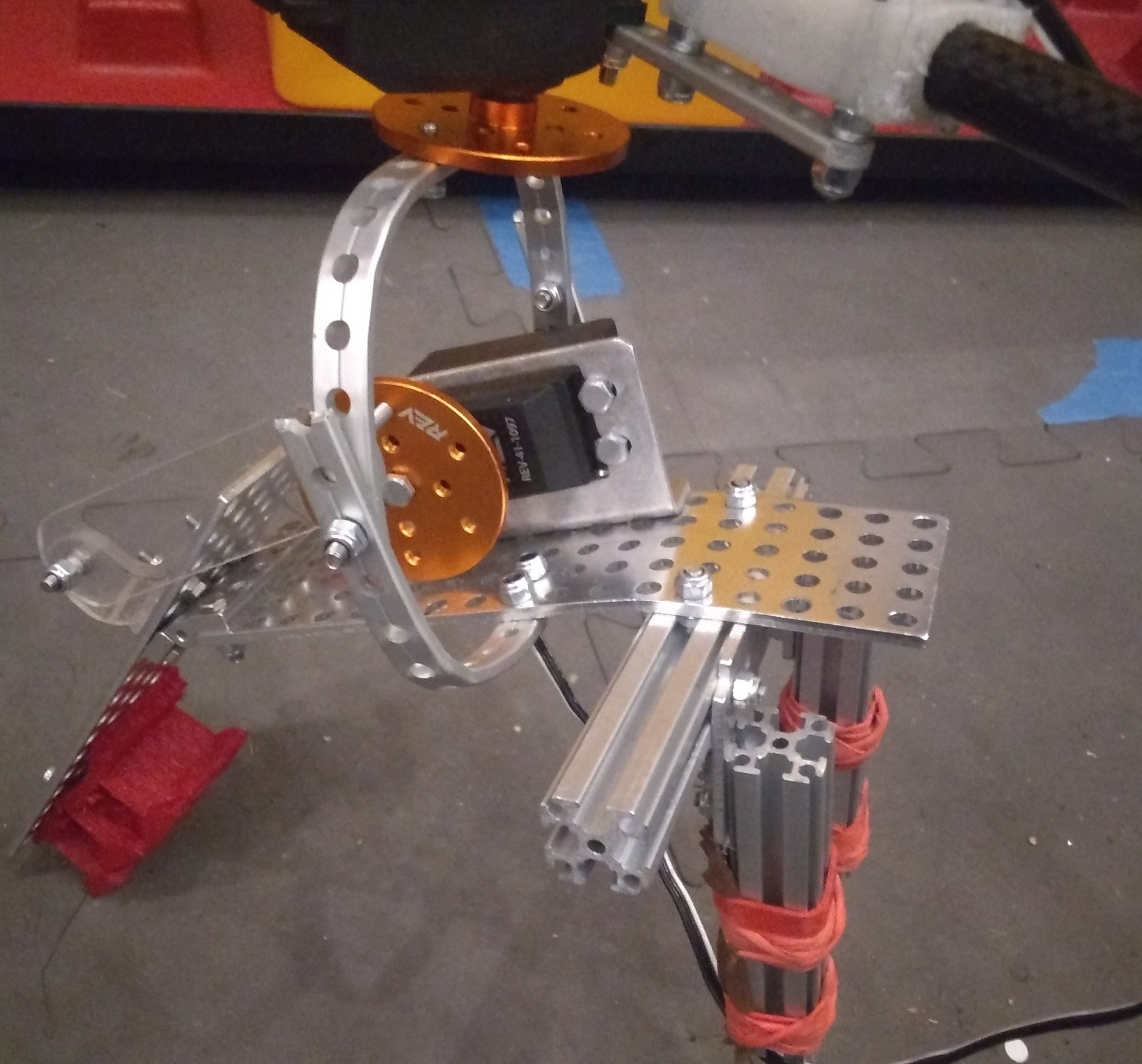
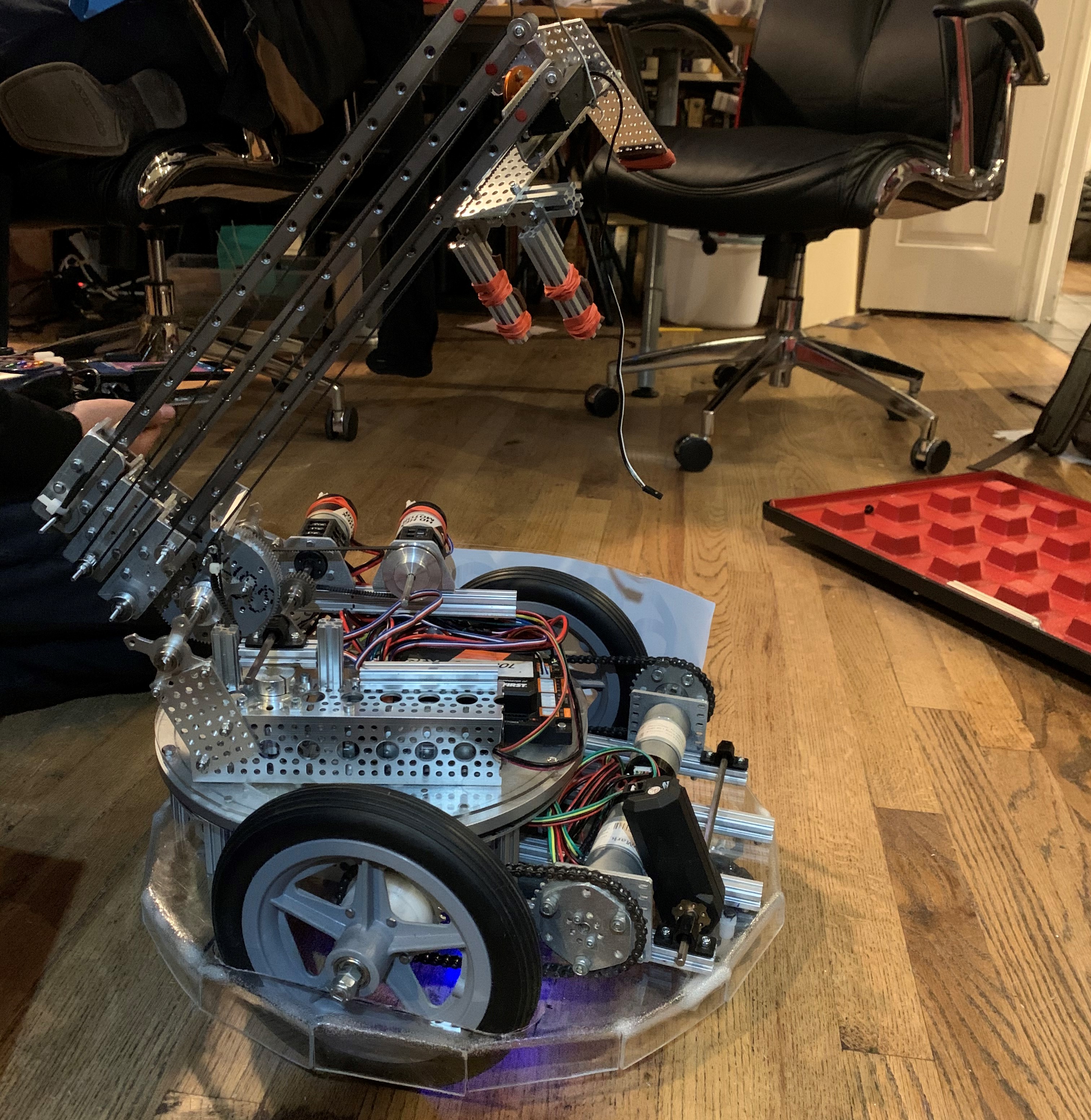
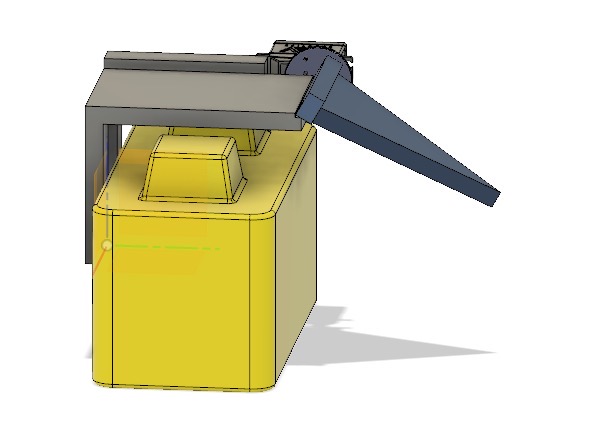
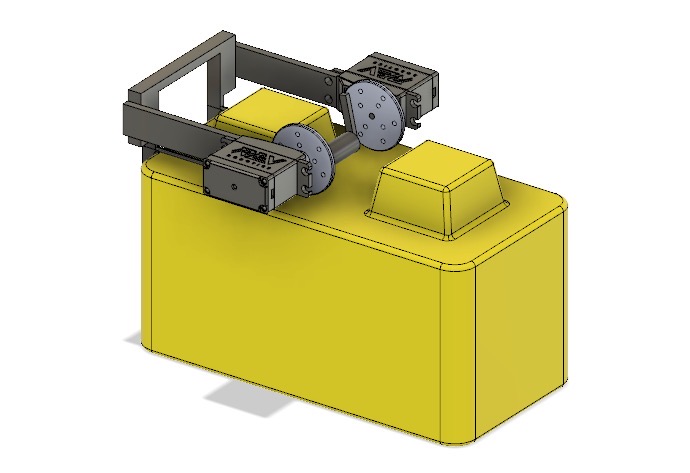
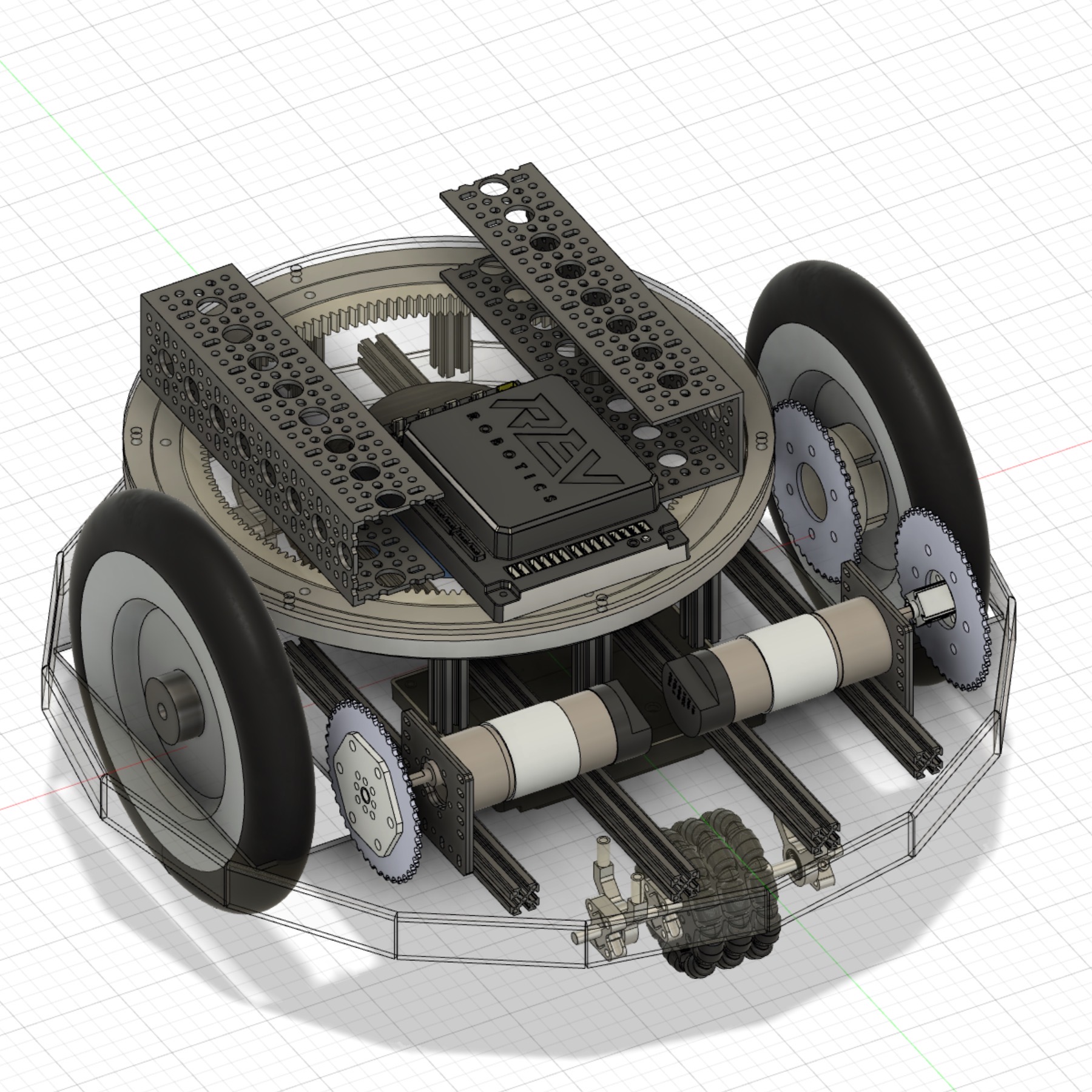
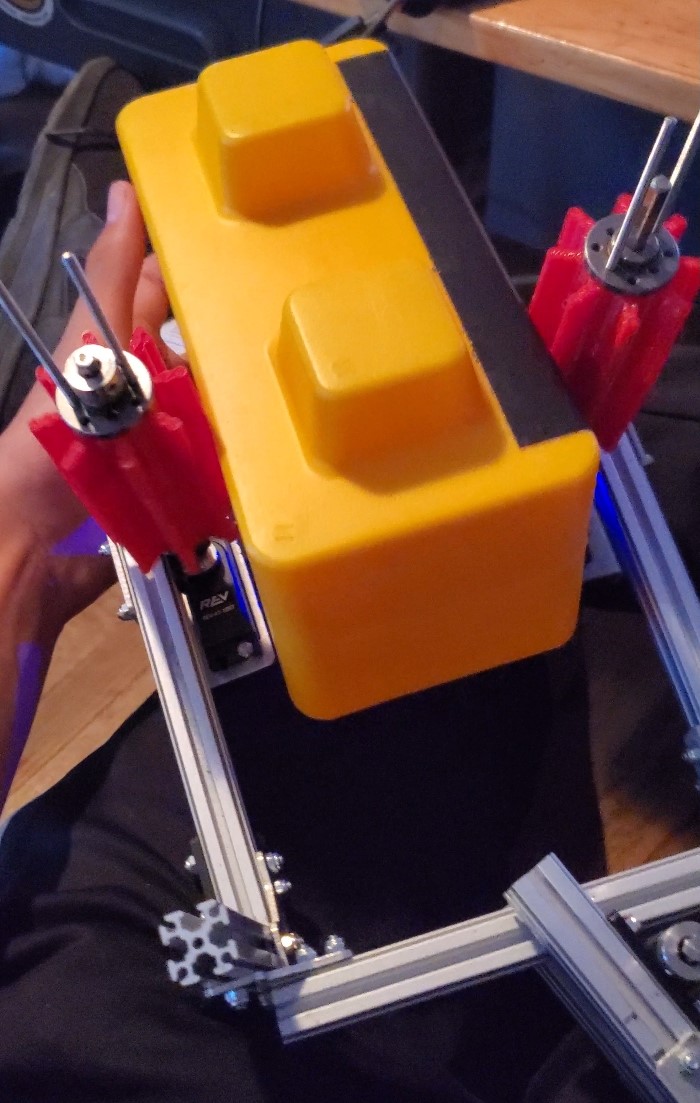
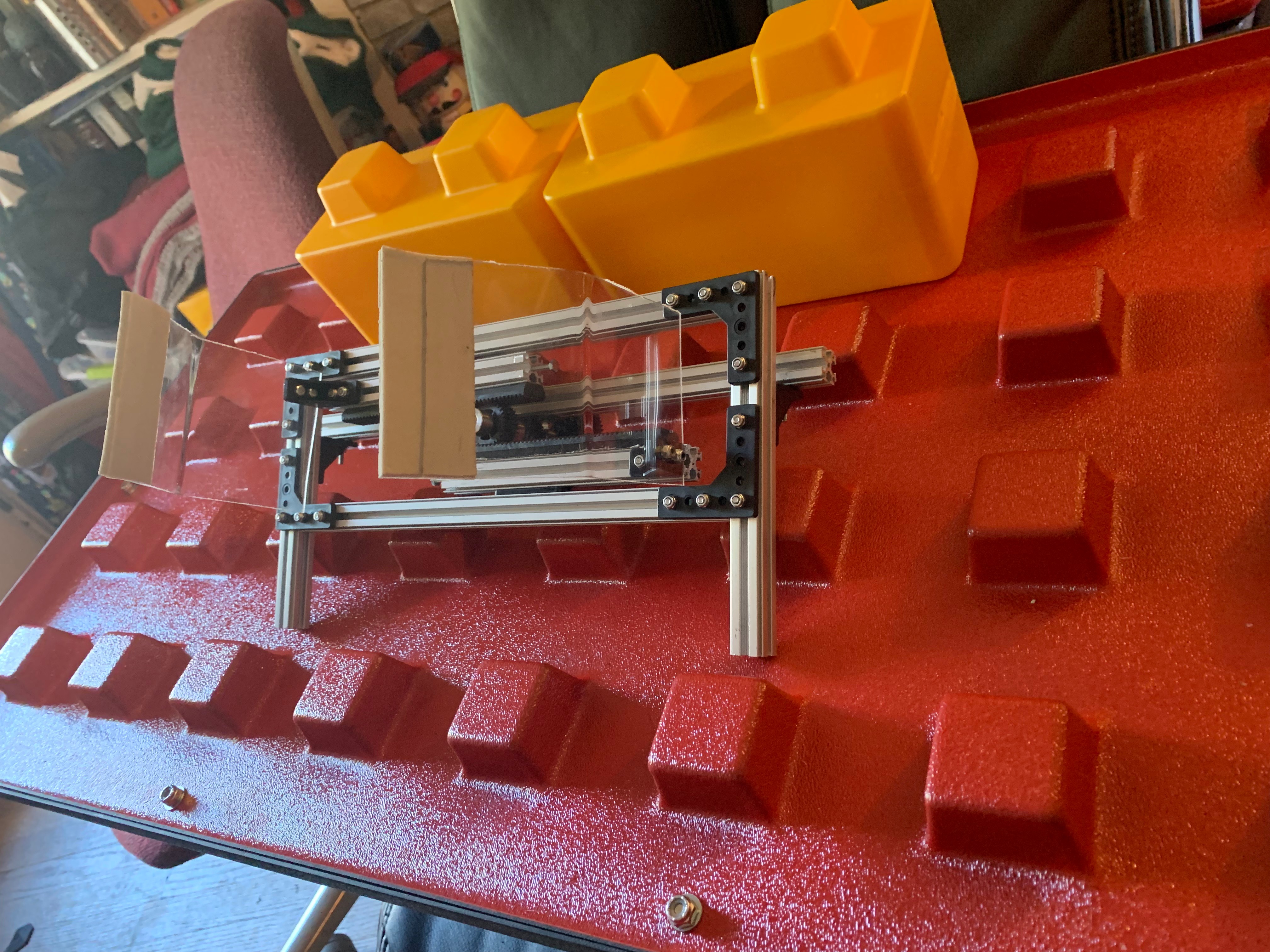
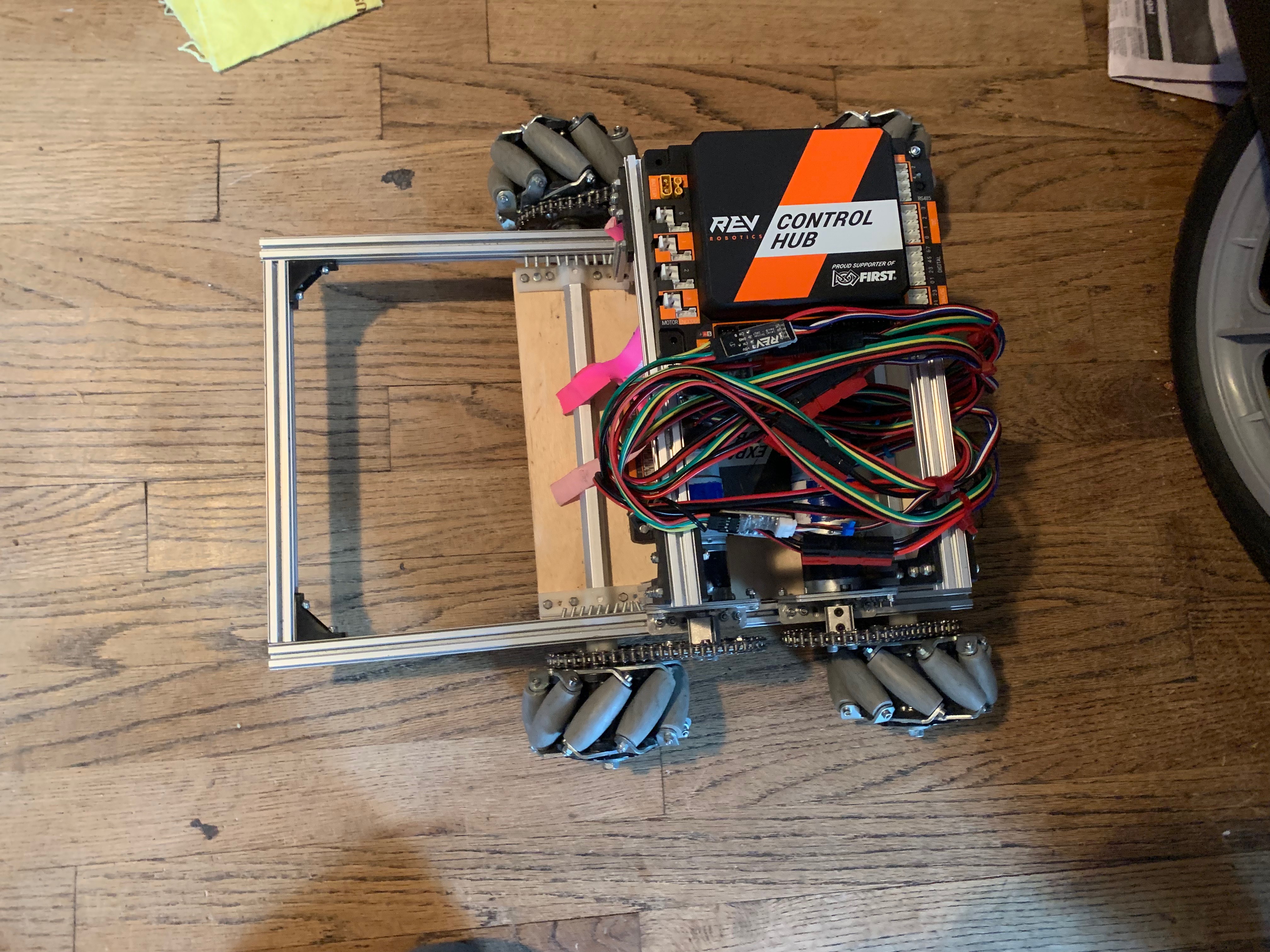
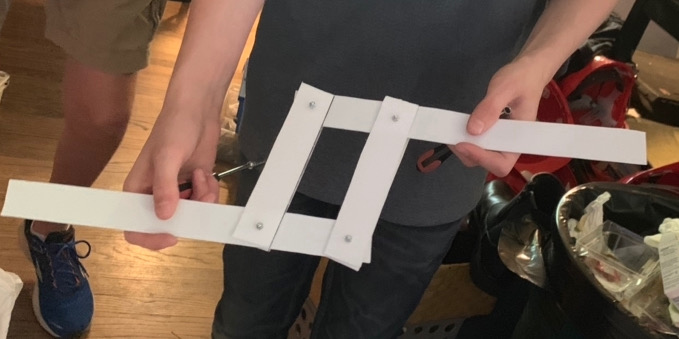
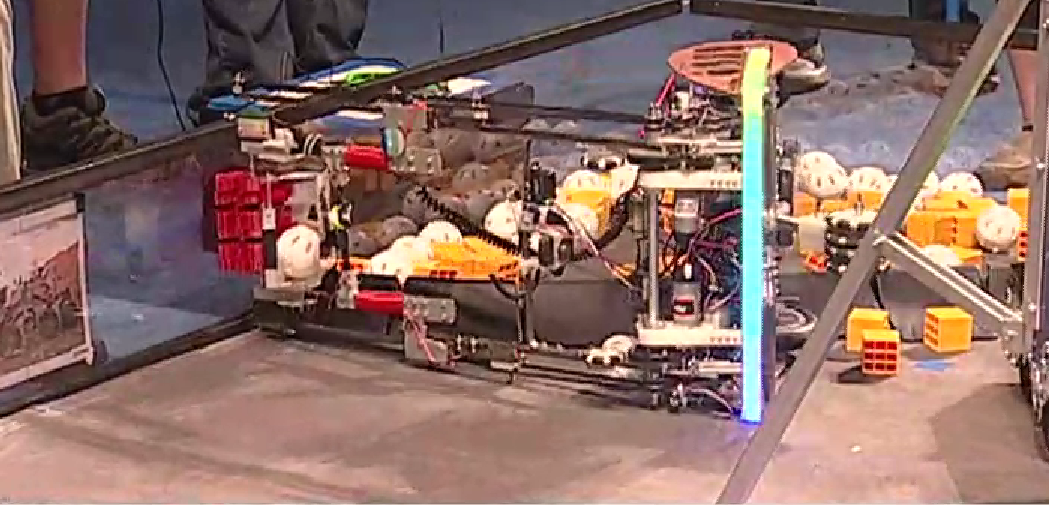
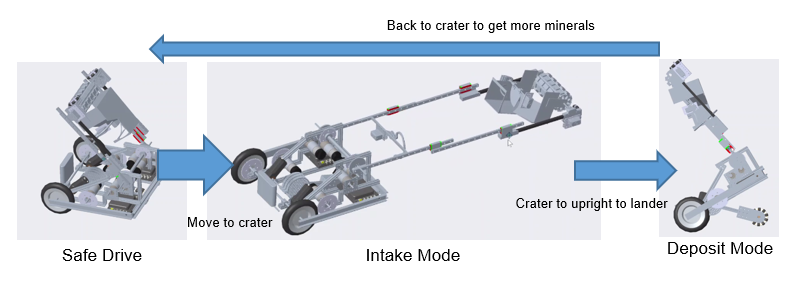
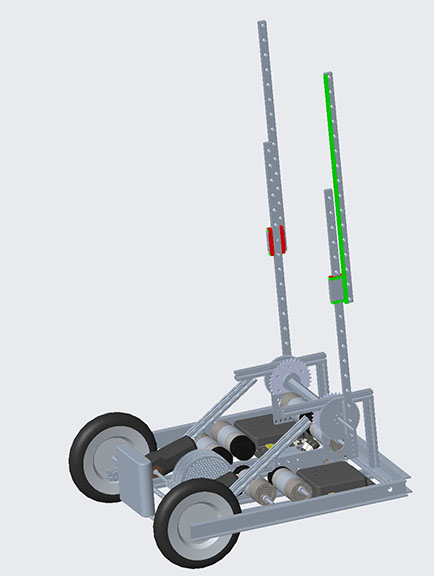
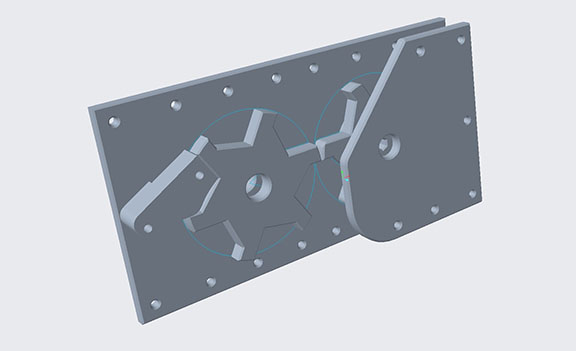
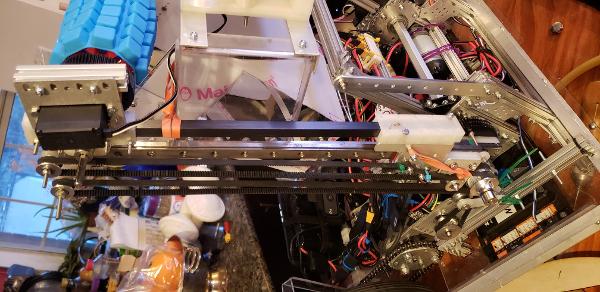
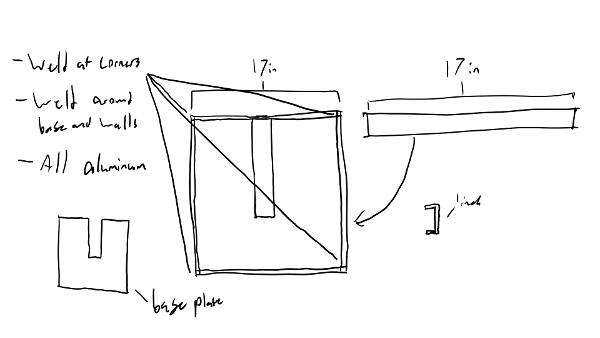
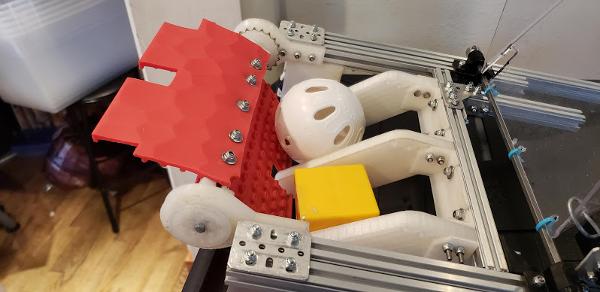
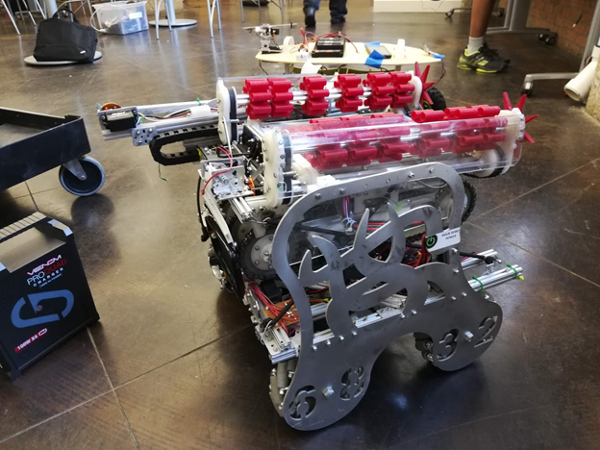
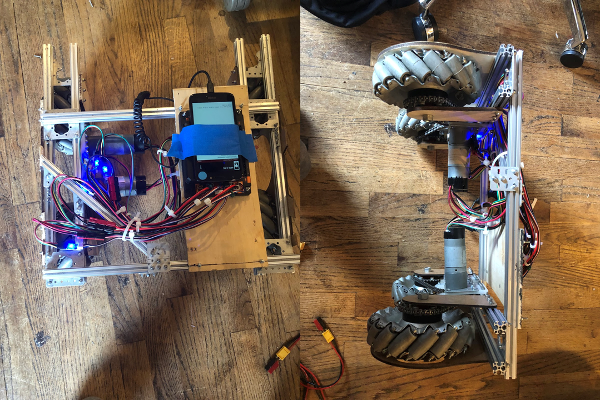
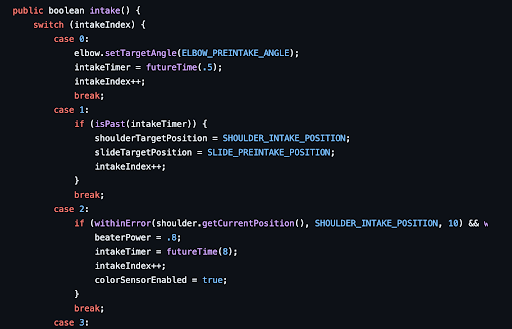 The beginning of our Intake articulation
The beginning of our Intake articulation 













































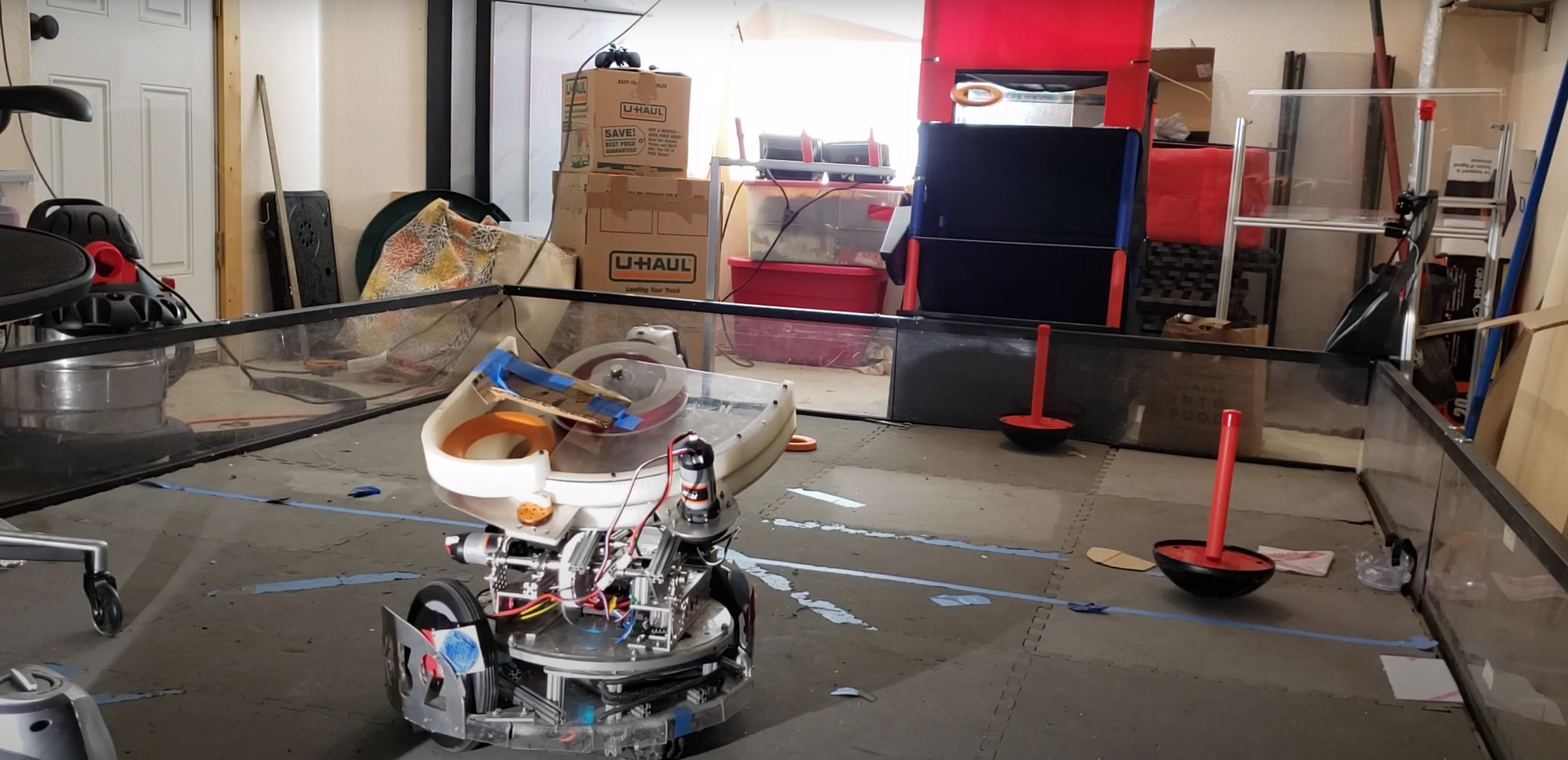



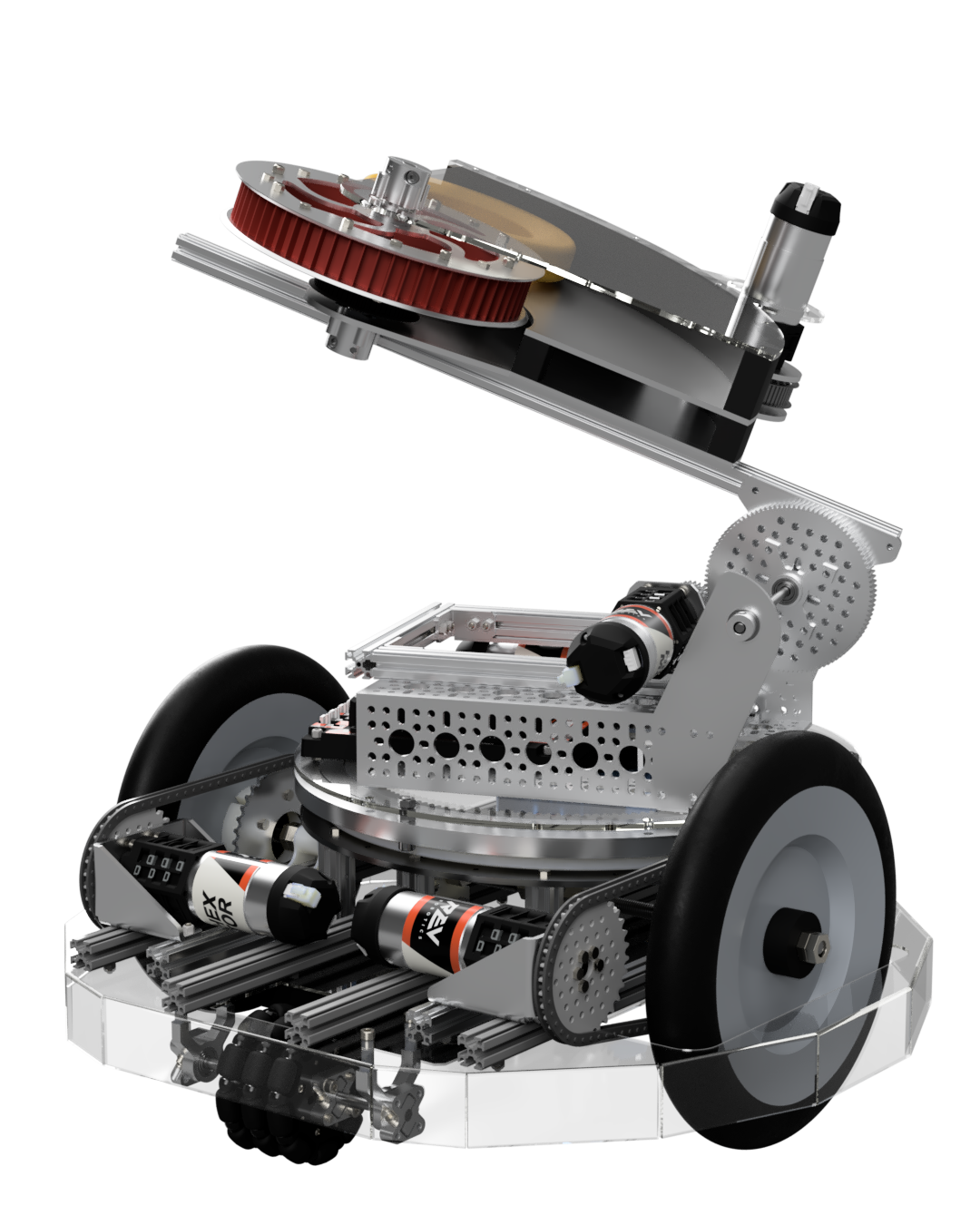



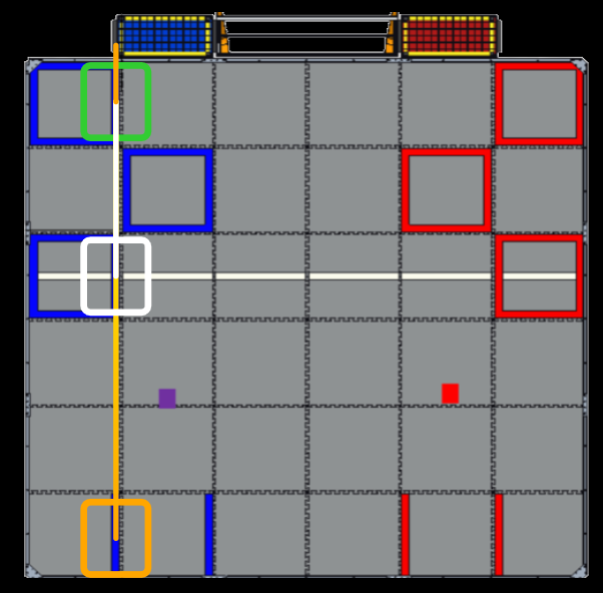























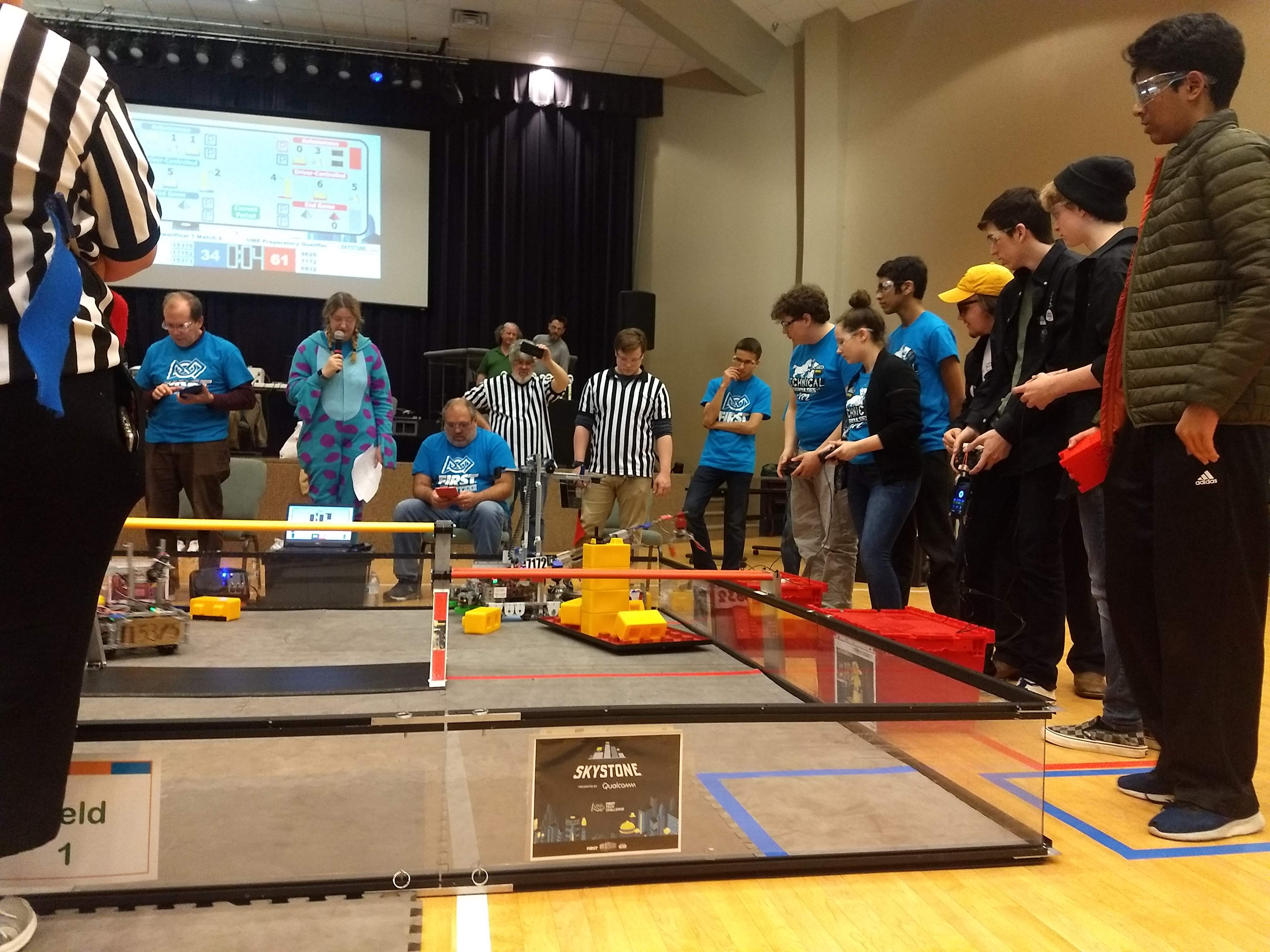












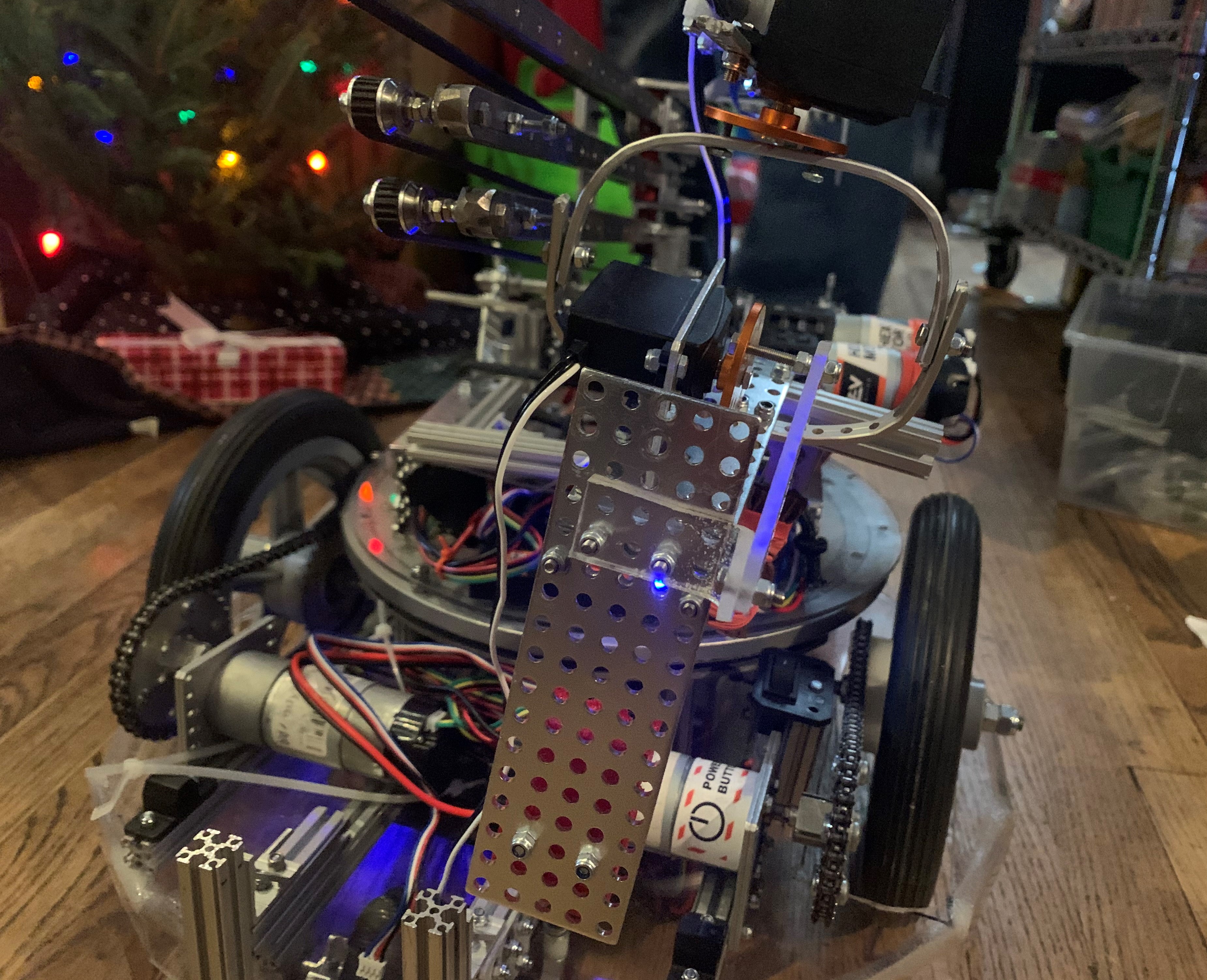

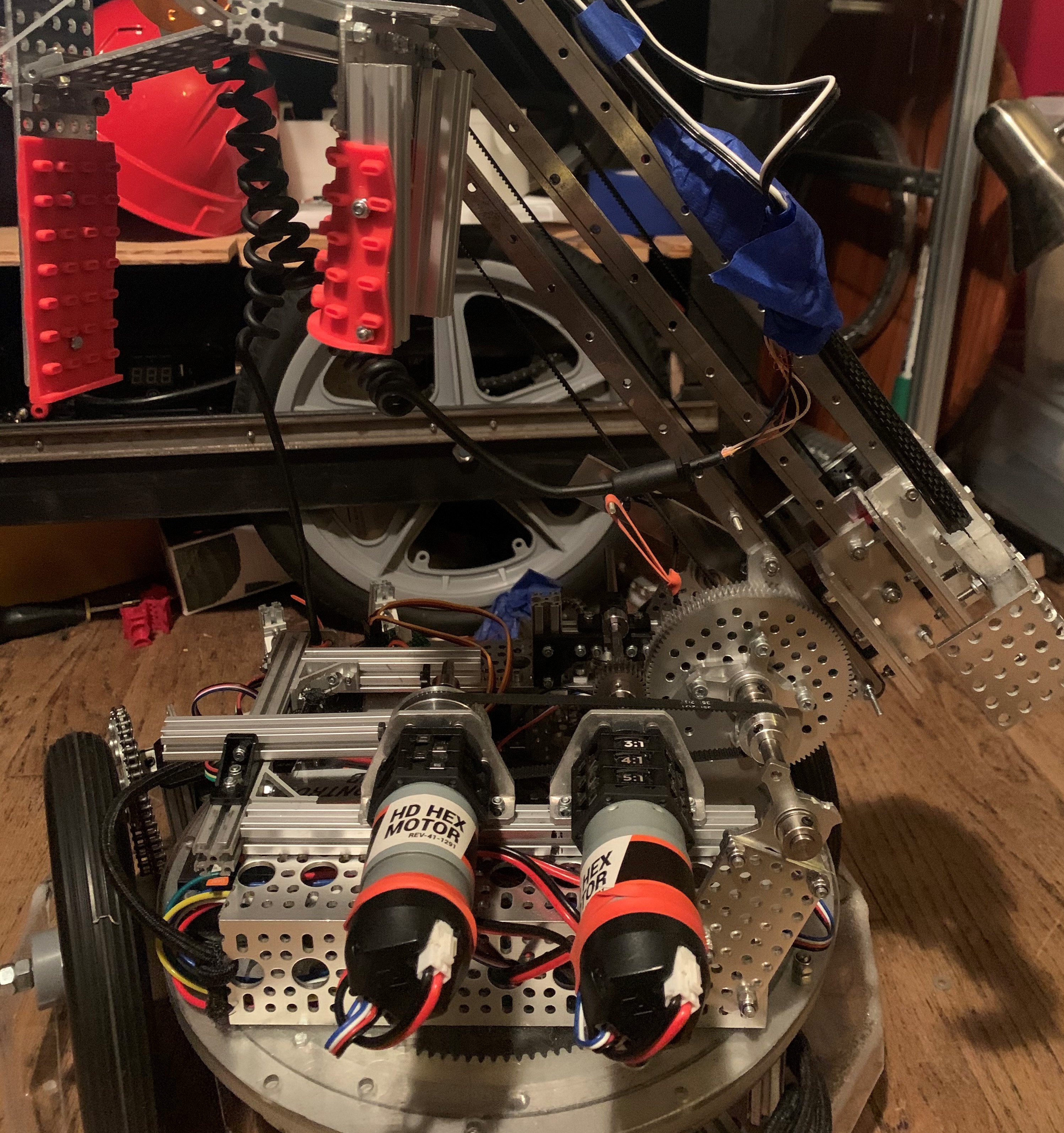






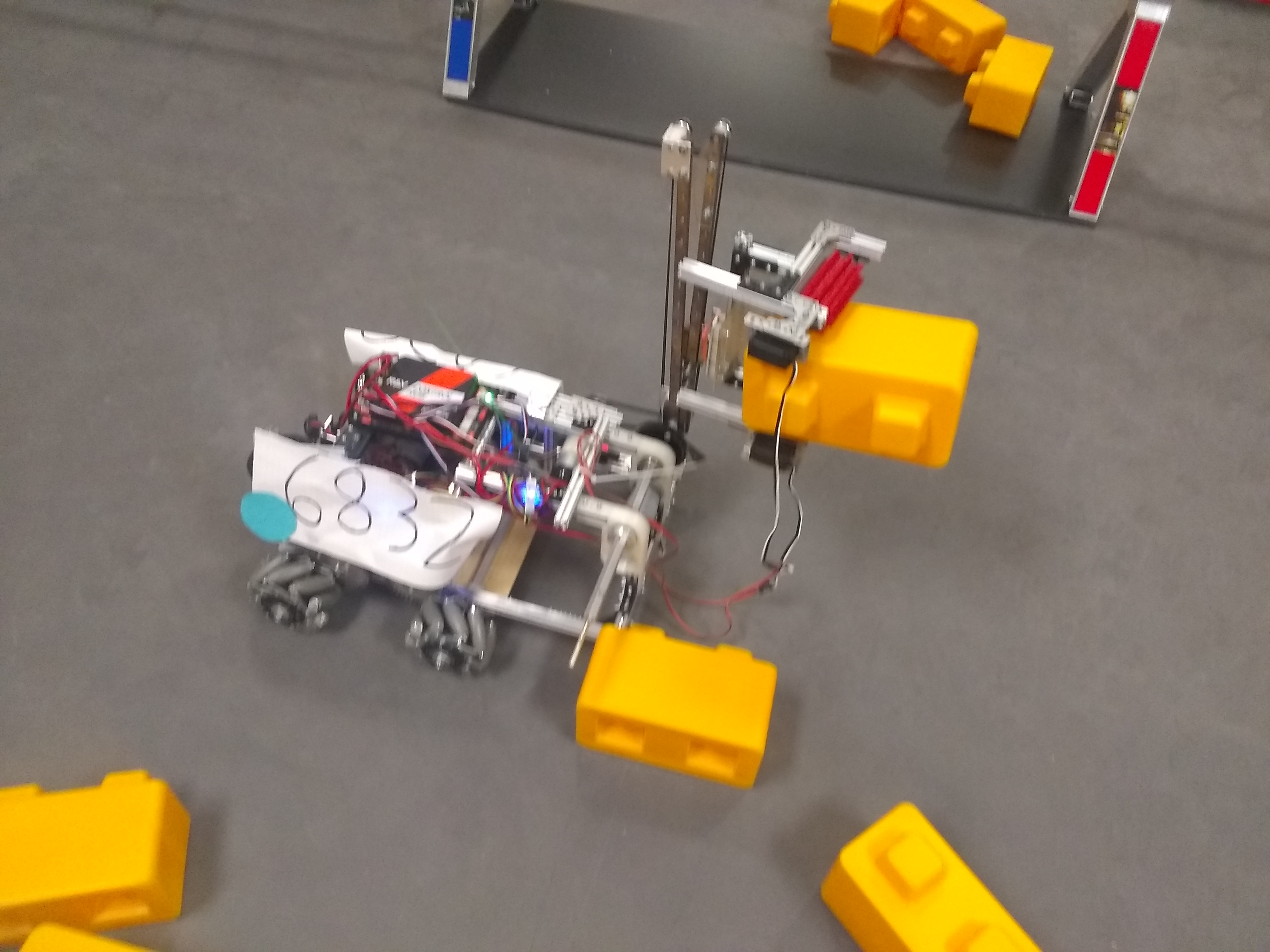













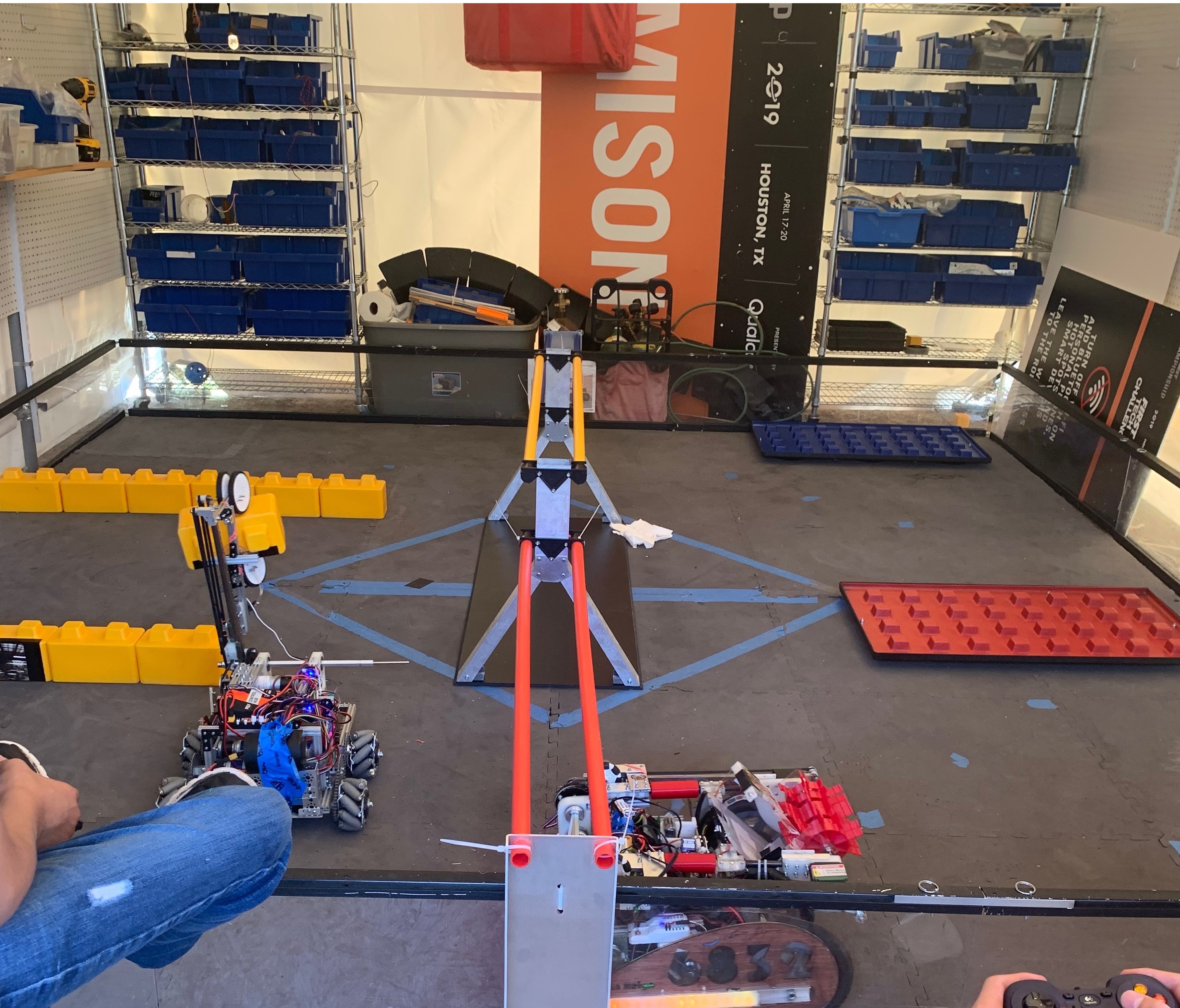
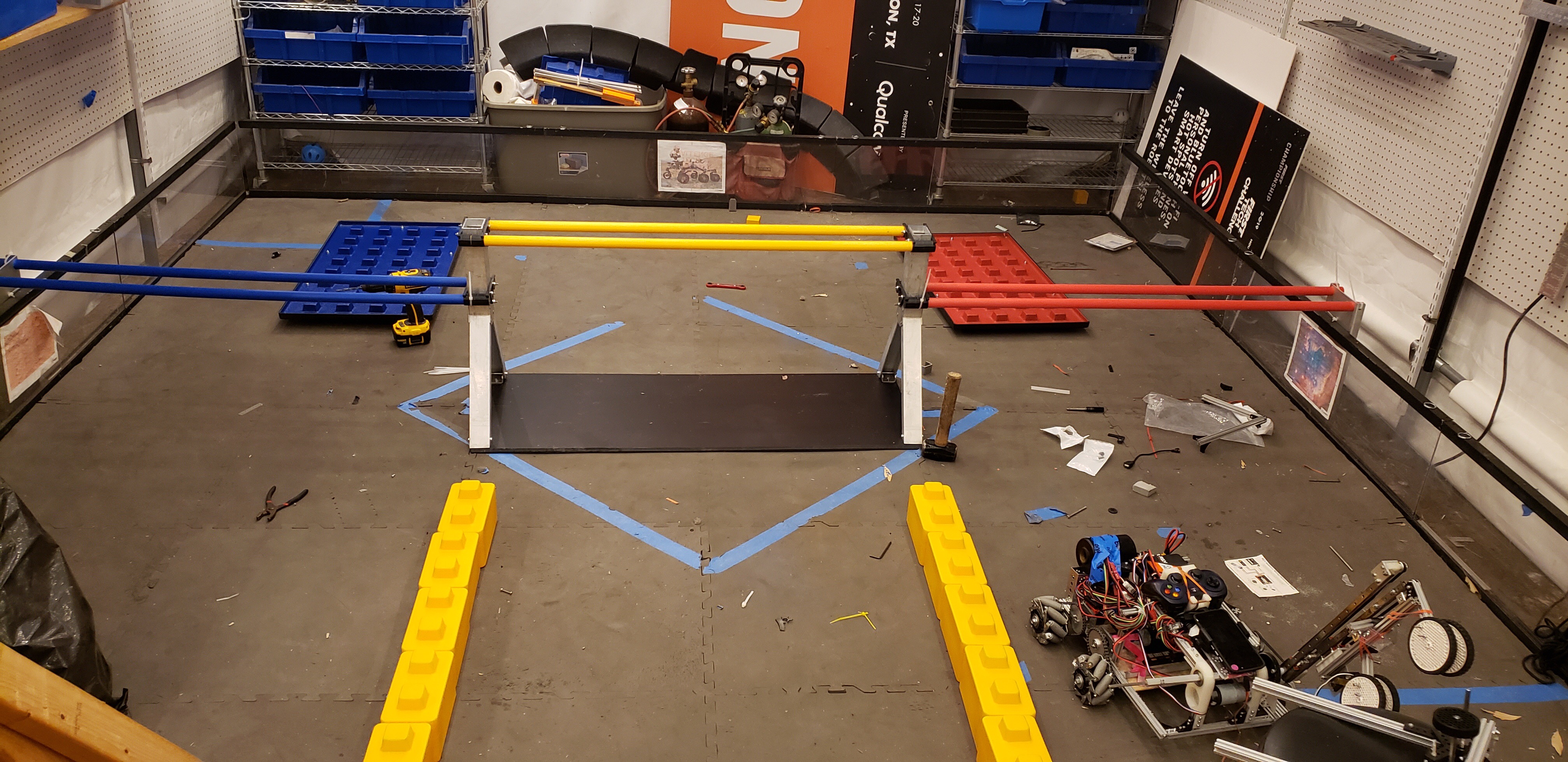











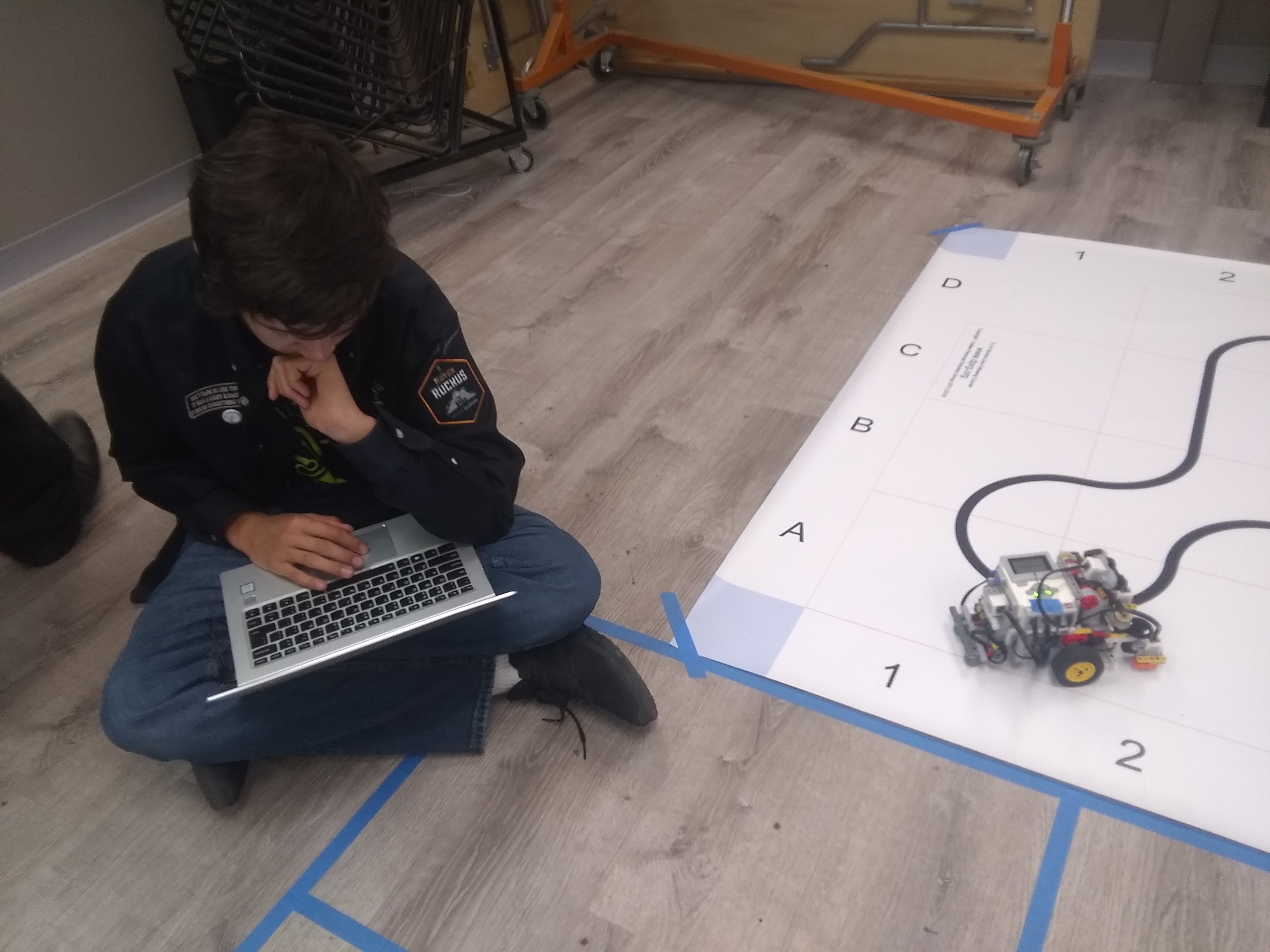
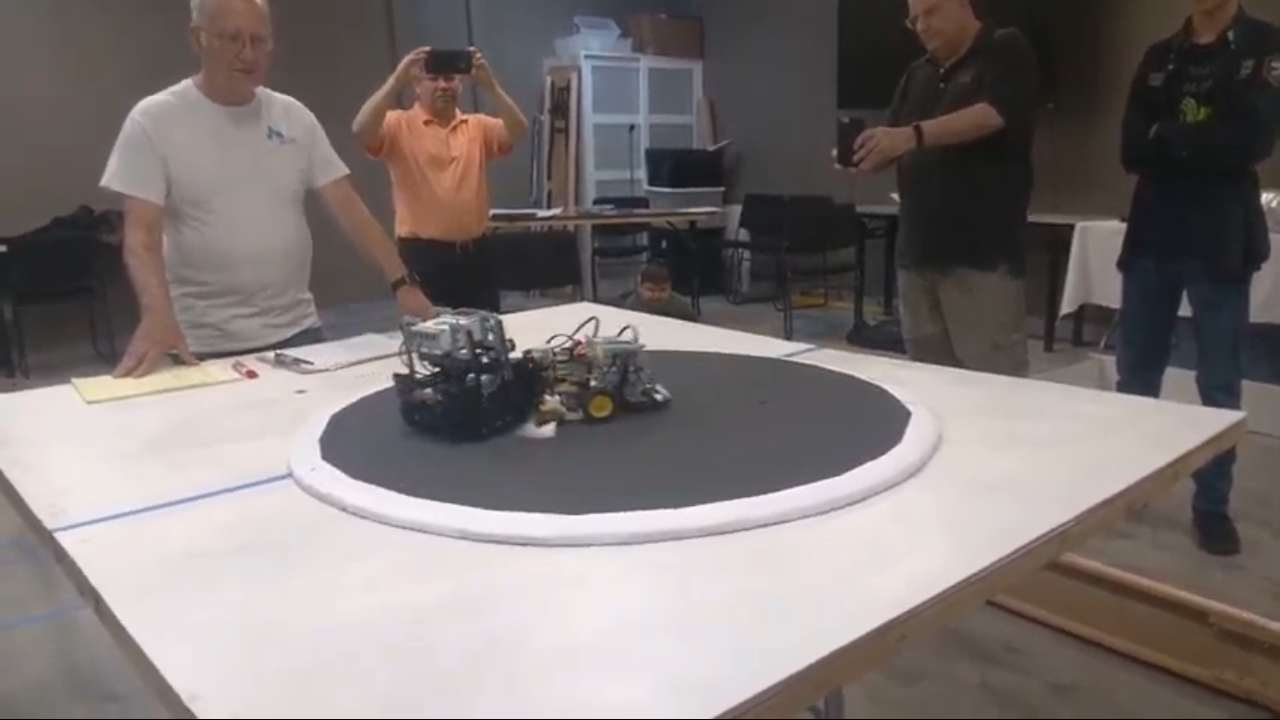


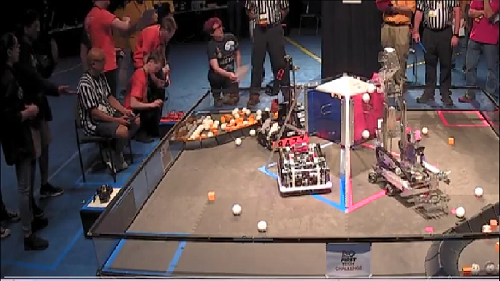
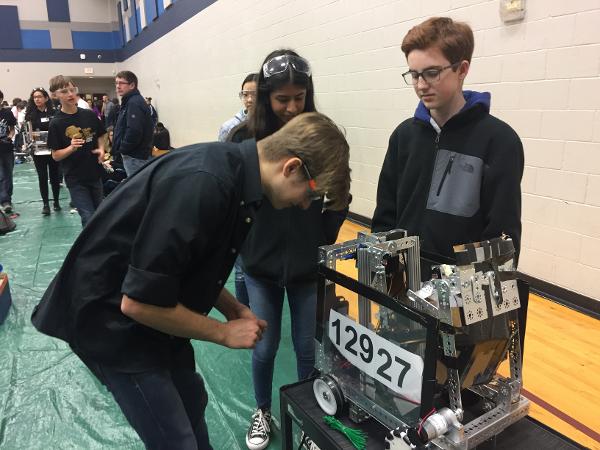
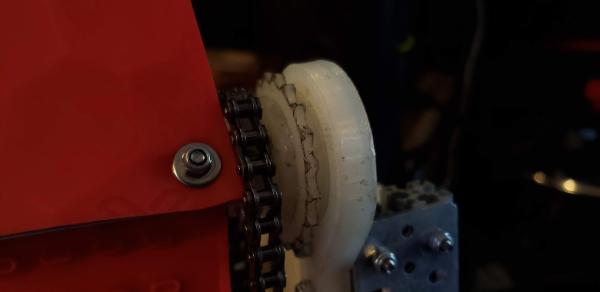
 Match 7(Q121)
Match 7(Q121) 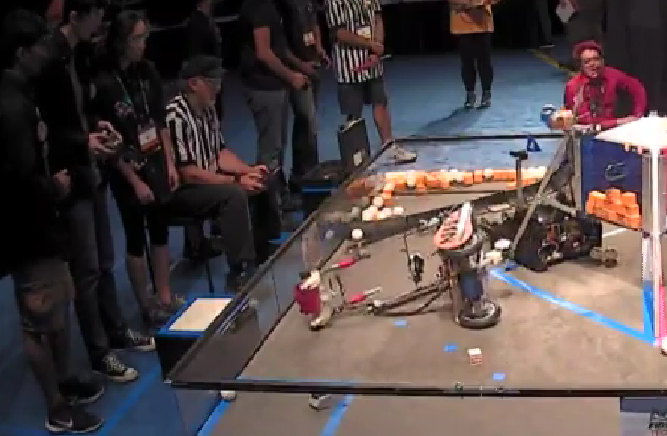
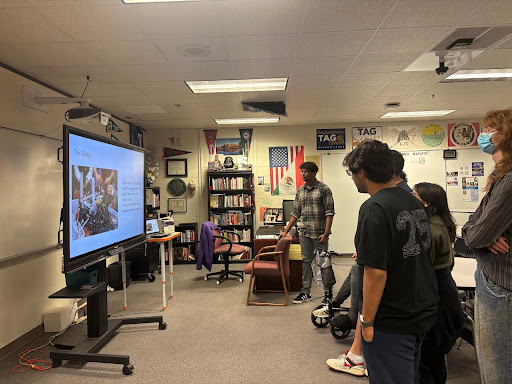
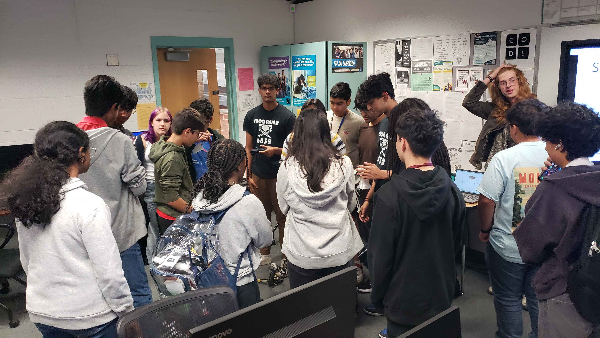
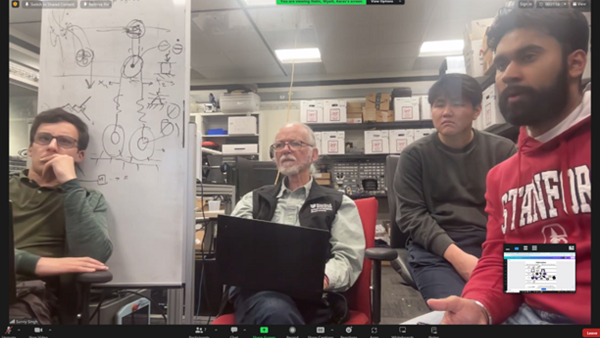
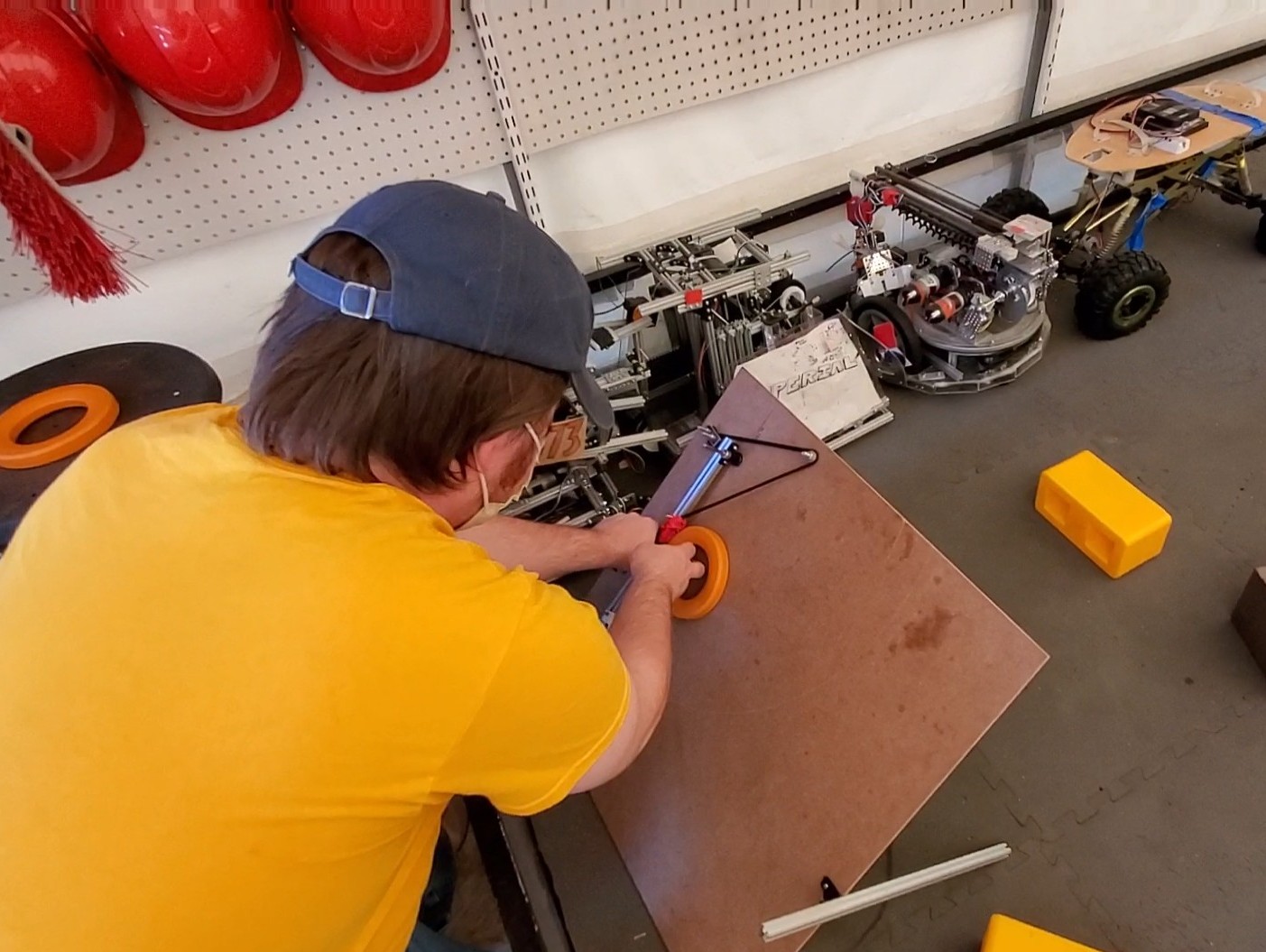
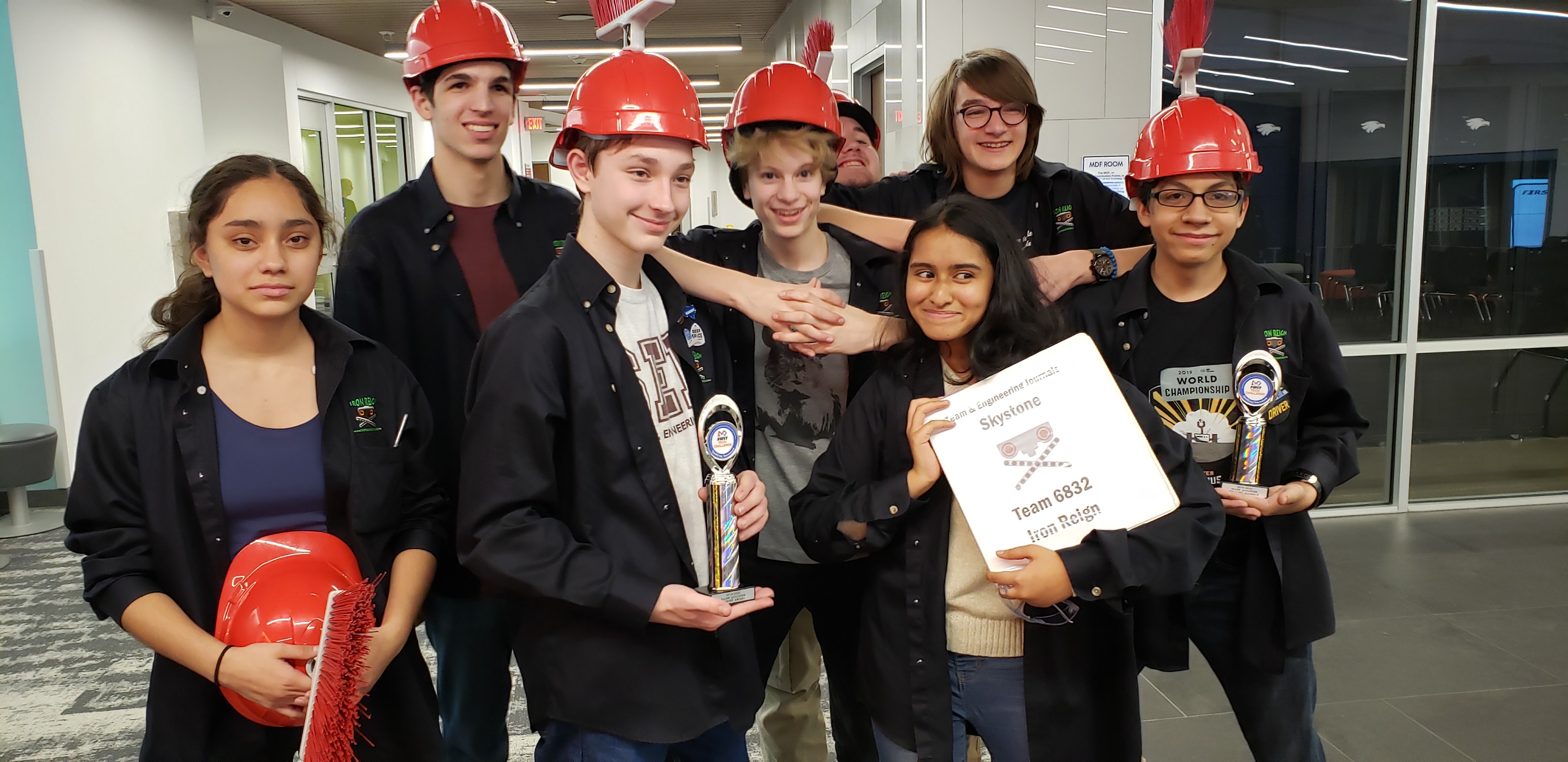
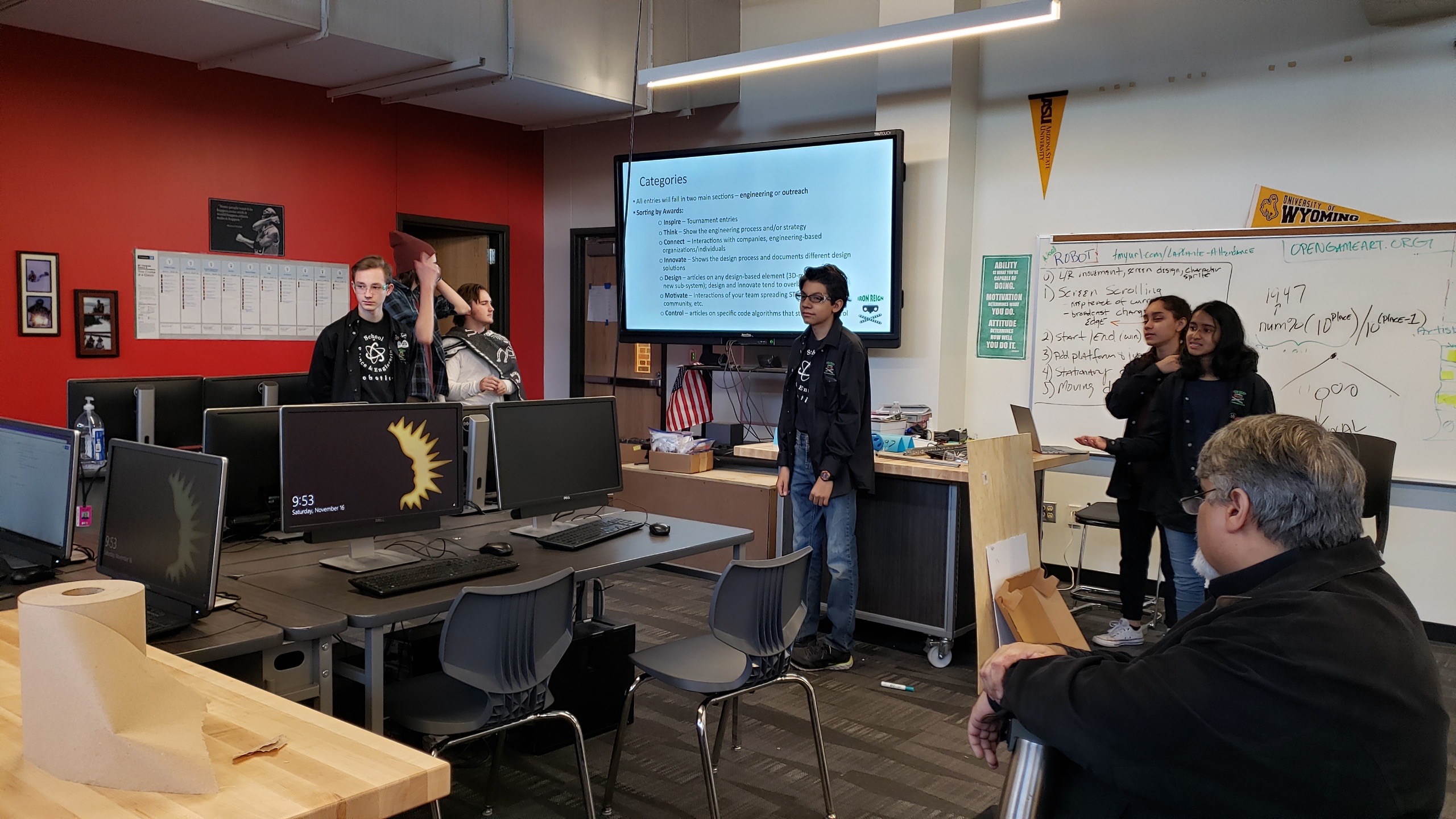
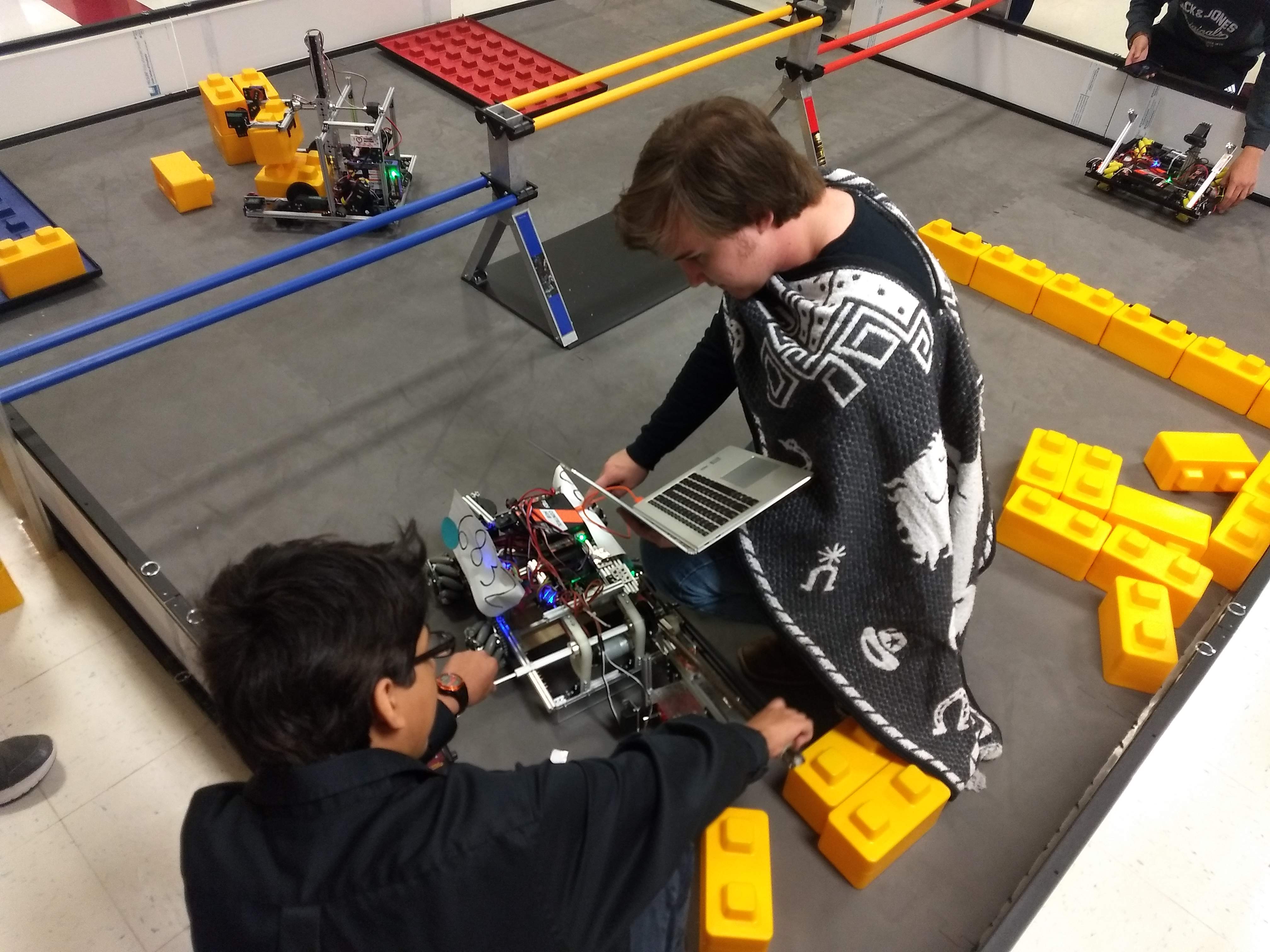
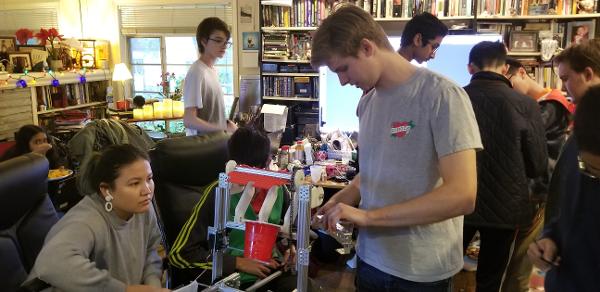
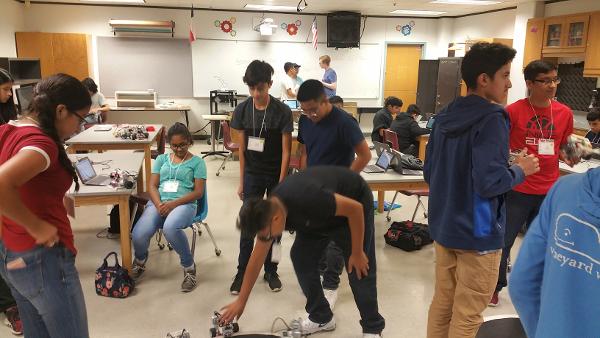
 Founders of REV working with our team
Founders of REV working with our team 










































































 ...
...